This is the multi-page printable view of this section. Click here to print.
Agile Live 5.0.0 developer reference
- 1: REST API v2
- 2: Agile Live Rendering Engine command documentation
- 3: C++ SDK
- 3.1: Classes
- 3.1.1: AclLog::CommandLogFormatter
- 3.1.2: AclLog::FileLocationFormatterFlag
- 3.1.3: AclLog::ThreadNameFormatterFlag
- 3.1.4: AlignedAudioFrame
- 3.1.5: AlignedFrame
- 3.1.6: ControlDataCommon::ConnectionStatus
- 3.1.7: ControlDataCommon::Response
- 3.1.8: ControlDataCommon::StatusMessage
- 3.1.9: ControlDataReceiver
- 3.1.10: ControlDataReceiver::IncomingRequest
- 3.1.11: ControlDataReceiver::ReceiverResponse
- 3.1.12: ControlDataReceiver::Settings
- 3.1.13: ControlDataSender
- 3.1.14: ControlDataSender::Settings
- 3.1.15: DeviceMemory
- 3.1.16: IngestApplication
- 3.1.17: IngestApplication::Settings
- 3.1.18: ISystemControllerInterface
- 3.1.19: ISystemControllerInterface::Callbacks
- 3.1.20: ISystemControllerInterface::Response
- 3.1.21: MediaReceiver
- 3.1.22: MediaReceiver::NewStreamParameters
- 3.1.23: MediaReceiver::Settings
- 3.1.24: MediaStreamer
- 3.1.25: MediaStreamer::Configuration
- 3.1.26: PipelineSystemControllerInterfaceFactory
- 3.1.27: SystemControllerConnection
- 3.1.28: SystemControllerConnection::Settings
- 3.1.29: TimeCommon::TAIStatus
- 3.1.30: TimeCommon::TimeStructure
- 3.2: Files
- 3.2.1: include/AclLog.h
- 3.2.2: include/AlignedFrame.h
- 3.2.3: include/Base64.h
- 3.2.4: include/ControlDataCommon.h
- 3.2.5: include/ControlDataReceiver.h
- 3.2.6: include/ControlDataSender.h
- 3.2.7: include/DeviceMemory.h
- 3.2.8: include/IngestApplication.h
- 3.2.9: include/IngestUtils.h
- 3.2.10: include/ISystemControllerInterface.h
- 3.2.11: include/MediaReceiver.h
- 3.2.12: include/MediaStreamer.h
- 3.2.13: include/PipelineSystemControllerInterfaceFactory.h
- 3.2.14: include/SystemControllerConnection.h
- 3.2.15: include/TimeCommon.h
- 3.2.16: include/UUIDUtils.h
- 3.3: Namespaces
- 3.3.1: AclLog
- 3.3.2: ControlDataCommon
- 3.3.3: IngestUtils
- 3.3.4: spdlog
- 3.3.5: TimeCommon
- 3.3.6: UUIDUtils
- 4: System controller config
1 - REST API v2
The following is a rendering of the OpenAPI for the Agile Live System Controller using Swagger. It does not have a backend server, so it cannot be run interactively.
This API is available from the server at the base URL /api/v2.
2 - Agile Live Rendering Engine command documentation
This page describes all the commands available in the Agile Live Rendering Engine.
Command protocol
All commands to the Agile Live Rendering Engine is sent as human readable strings and are listed below. The Rendering Engine expect no line termination, meaning that you do not need to append any type of new line (\n) characters, or string termination (\0) characters.
Video commands
Background
The data path of the video mixer in the Rendering Engine looks as follows:
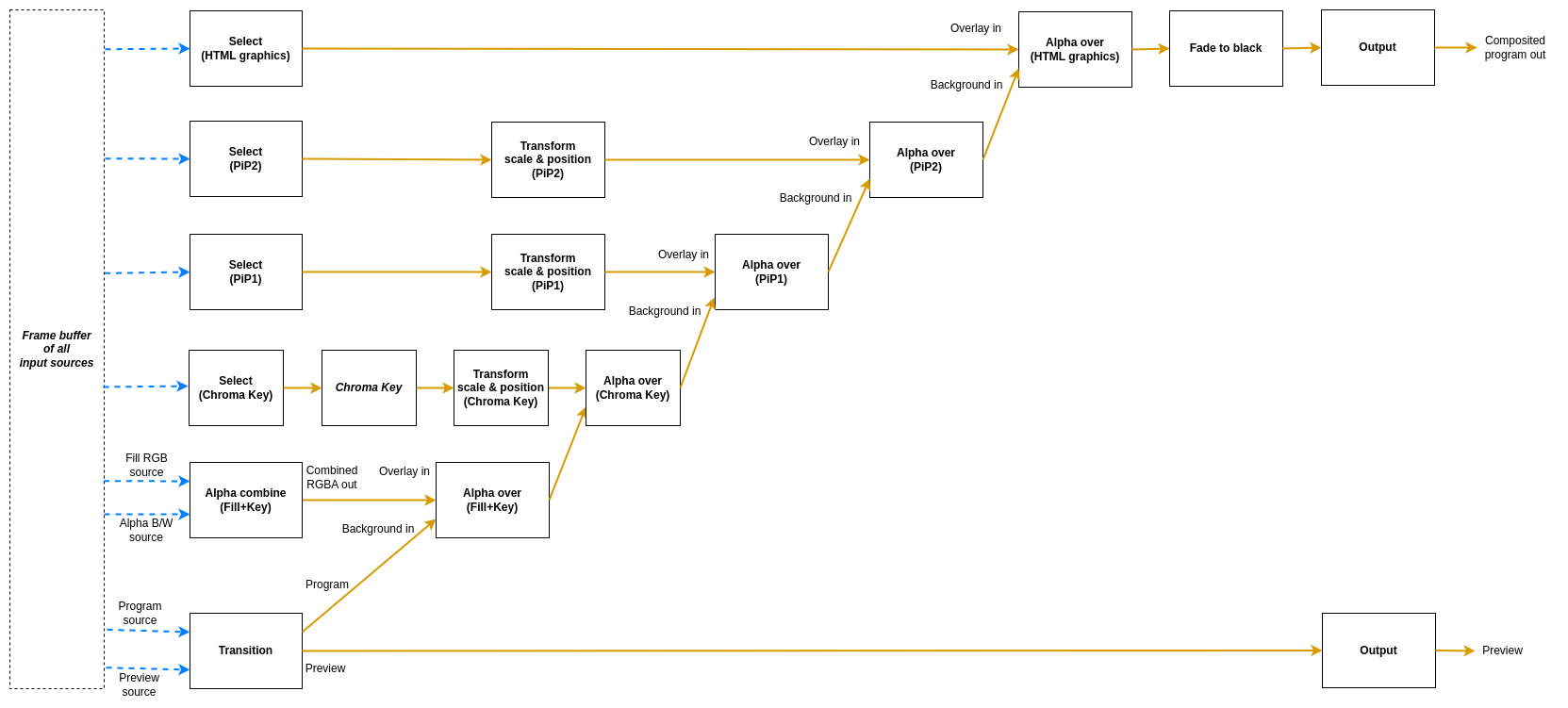
There are eight different node types used in this mixer.
- The
Transitionnode is used to pick which input slots to use for the program and preview output. The node also supports making transitions between the program and preview. - The
Selectnode simply forwards one of the available sources to its output. - The
Transformnode takes one input stream and transforms it (scaling and translating) to one output stream. - The
Alpha combinenode is used to pick two input slots (or the same input slot) to copy the color from one input and combine it with some information from the other input to form the alpha. The color will just be copied from the color input frame, but there are several modes that can be used to produce the alpha channel in the output frame in different ways. This is known as “key & fill” in broadcasting. - The
Alpha overnode is used to perform an “Alpha Over” operation, that is to put the overlay video stream on top of the background video stream, and let the background be seen through the overlay depending on the alpha of the overlay. The node also features fading the graphics in and out by multiplying the alpha channel by a constant factor. - The
Chroma Keynode takes one input stream, and by setting appropriate parameters for the keying, it will remove areas with the key color from the incoming video stream both affecting the alpha and color channels - The
Fade to blacknode takes one input stream, which it can fade to or from black gradually, and then outputs that stream. - The
Outputnode has one input stream and will output that stream out from the video mixer, back to the Rendering Engine
There are six different flows into this mixer. There is the one starting with the Transition node, which represents the main
program that is being produced. Overlaying on top of that is one key+fill graphics overlay (starting with an Alpha Combine node which can combine two video inputs with key form one and fill from another, or both from the same source),
then there is a chroma key overlay, which can be used to add green screen effects (Starting with a Select node), then there are two instances of picture-in-picture flows (also starting with select nodes) and on top of that another graphics overlay, called HTML graphics in the illustration, but which can be used with any source where the key and fill comes from the same source.
The overlay flows are inserted into the main program using Alpha over nodes.
Each video command in the Rendering Engine command protocol targets one of these nodes.
Transitions
The main flow of the video mixer can be controlled with the following commands:
transition cut <input_slot>- Cut (hot punch) the program output to the given input slot. This won’t affect the preview output.transition preview <input_slot>- Preview the given input slot. This won’t affect the program output.transition cut- Cut between the current program and preview outputs, effectively swapping their place.transition panic <input_slot>- Cut (hot punch) both the preview and program output to the given input slot.
Some transition commands last over a duration of time, for example wipes. These can be performed either automatically or manually. The automatic mode works by the operator first selecting the type of transition, for instance a fade, setting the preview to the input slot to fade to and then trigger the transition at the right time with a set duration for the transition. In manual mode the exact “position” of the transition is set by the control panel. This is used for implementing T-bars, where the T-bar repeatedly sends the current position of the bar. In the manual mode, the transition type is set before the transition begins, just as in the automatic mode. Note that an automatic transition will be overridden in case the transition “position” is manually set, by interrupting the automatic transition and jumping to the manually set position.
transition type <type>- Set the transition type to use for transitions hereafter. Valid modes are:fade- Fade (mix) from one source to the nextwipe_left- Wipe from one source to the next, wipe going from right side of the screen to the leftwipe_right- Wipe from one source to the next, wipe going from left side of the screen to the right
transition auto <duration_ms>- Perform an automatic transition from the current program output to the current preview output, lasting for<duration_ms>milliseconds. The currently set transition type is used.transition factor <factor>- Manually set the position/factor of the transition.<factor>should be between 0.0 and 1.0, where 0.0 is the value before the transition starts and 1.0 is the end of the transition. Note that setting this value to 1.0 will effectively swap place of program and preview output, resetting the transition factor to 0.0 internally. Control panels using this command must take this into consideration to not cause a sudden jump in the transition once the physical control is moved again. Sending this command will interrupt any ongoing automatic transition.
Key and fill
The key and fill graphics flow will be inserted before the picture-in-picture flows, and will therefore be rendered under them. The graphics flow can be controlled with these commands:
alpha_combine color <input_slot>- Set which input slot to copy the color data from in the Alpha combine nodealpha_combine alpha <input_slot>- Set which input slot to use to create the alpha channel of the output frame in the Alpha combine nodealpha_combine mode <mode>- Set which way the alpha channel of the output frame will be produced. Valid modes are:copy-r- Copy the R-channel of the input “alpha frame” and use it as alpha for the outputcopy-g- Copy the G-channel of the input “alpha frame” and use it as alpha for the outputcopy-b- Copy the B-channel of the input “alpha frame” and use it as alpha for the outputcopy-a- Copy the A-channel of the input “alpha frame” and use it as alpha for the outputaverage-rgb- Take the average of the R, G and B channels of the input “alpha frame” and use it as alpha channel for the output
alpha_over factor <factor>- Manually set the transparency multiplier for the Alpha over node. The value<factor>should be a float between 0.0 and 1.0, where 0.0 means that the overlay is completely invisible and 1.0 means that the overlay is fully visible (where it should be visible according to the overlay image’s alpha channel). Default is 0.0.alpha_over fade to <duration_ms>- Start an automatic fade from the current factor to a fully visible overlay over the duration of<duration_ms>milliseconds.alpha_over fade from <duration_ms>- Start an automatic fade from the current factor to a fully invisible overlay over the duration of<duration_ms>milliseconds.
Picture-in-Picture
The two picture-in-picture boxes can be controlled with these commands:
pip1_select cut <input_slot>- Choose which input slot to forward. Changing looks like a cut.pip1_transform scale <factor>- Set the scale of the picture-in-picture box, relative the original size. Parameter factor must be > 0. Default is 1.0.pip1_transform x <position>- Set the X offset of the top left corner of the picture-in-picture box, relative the top left corner of the frame. Position is measured in percent of frame width, where 0.0 is the left side of the frame and 1.0 is the right side of the frame. Values outside of the range 0, 1 are valid. Default is 0.0.pip1_transform y <position>- Set the Y offset of the top left corner of the picture-in-picture box, relative the top left corner of the frame. Position is measured in percent of frame height, where 0.0 is the top of the frame and 1.0 is the bottom of the frame. Values outside of the range 0, 1 are valid. Default is 0.0.pip1_alpha_over factor <factor>- Manually set the transparency multiplier for the picture-in-picture 1 Alpha over node. The value<factor>should be a float between 0.0 and 1.0, where 0.0 means that the picture-in-picture box is completely invisible and 1.0 means that the box is fully visible. Default is 0.0.pip1_alpha_over fade to <duration_ms>- Start an automatic fade from the current factor to a fully visible picture-in-picture box over the duration of<duration_ms>milliseconds.pip1_alpha_over fade from <duration_ms>- Start an automatic fade from the current factor to a fully invisible picture-in-picture box over the duration of<duration_ms>milliseconds.
For the second picture-in-picture flow, replace pip1 with pip2.
Chroma Key
The nodes of the chroma key branch of the graph can be controlled with these commands:
chroma_key_select cut <input_slot>- Choose which input slot to forward. Changing looks like a cut.chroma_key r <value>- Set the red component of the chroma key color. Should be a float between 0.0 and 1.0.chroma_key g <value>- Set the green component of the chroma key color. Should be a float between 0.0 and 1.0.chroma_key b <value>- Set the blue component of the chroma key color. Should be a float between 0.0 and 1.0.chroma_key distance <value>- Set the distance parameter, ranging from 0.0 to 1.0, telling how far from the key color is also considered a part of the key. Larger values will result in more colors being included, 0.0 means only the exact key color is considered.chroma_key falloff <value>- Set the falloff parameter, ranging from 0.0 to 1.0, which makes edges smoother. A lower value means harder edges between the key color and the parts to keep, a higher value means a more smooth falloff between removed and kept parts.chroma_key spill <value>- Set the color spill reduction parameter, ranging from 0.0 to 1.0, which will desaturate the key color in the parts of the image that are left. Useful for hiding green rims around objects in from of a green screen etc. 0.0 means off and a higher value means more colors further away from the chroma key color will be desaturated.chroma_key color_picker <x_factor> <y_factor> <square_size>- Set the chroma key by sampling the pixels covered by the square area of size square_size x square_size. The position x,y is set by<x_factor>* width of video and<y_factor>* height of video.<x_factor>&<y_factor>should be a float between 0.0 and 1.0. The<square_size>should be an integer > 0.0.chroma_key alpha_as_video <value>- Instead of writing an alpha mask, set the alpha value as the RGB value, creating a grayscale image of the mask. Value should be 0.0 or 1.0.chroma_key show_key_color <value>- Draw a 100x100 box in upper left corner with the current chroma key (RGB) value. Value should be 0.0 or 1.chroma_key show_color_picker <value>- Draw a pink border around the area where the color picker will sample a new chroma key. Value should be 0.0 or 1.chroma_key_transform scale <factor>- Set the scale of the chroma key output, relative the original size. Parameter factor must be > 0.0. Default is 1.0.chroma_key_transform x <position>- Set the X offset of the top left corner of the chroma key output, relative the top left corner of the frame. Position is measured in percent of frame width, where 0.0 is the left side of the frame and 1.0 is the right side of the frame. Values outside of the range 0.0, 1.0 are valid. Default is 0.0.chroma_key_transform y <position>- Set the Y offset of the top left corner of the chroma key output, relative the top left corner of the frame. Position is measured in percent of frame height, where 0.0 is the top of the frame and 1.0 is the bottom of the frame. Values outside of the range 0.0, 1.0 are valid. Default is 0.0.chroma_key_alpha_over factor <factor>- Manually set the transparency multiplier for the chroma key Alpha over node. The value<factor>should be a float between 0.0 and 1.0, where 0.0 means that the chroma key output is completely invisible and 1.0 means that the chroma key output is fully visible. Default is 0.0.chroma_key_alpha_over fade to <duration_ms>- Start an automatic fade from the current factor to a fully visible chroma key output over the duration of<duration_ms>milliseconds.chroma_key_alpha_over fade from <duration_ms>- Start an automatic fade from the current factor to a fully invisible chroma key output over the duration of<duration_ms>milliseconds.
Graphics overlay (HTML)
The overlay graphics flow, marked with HTML in the illustration. This will be inserted on top of both the key and fill and picture-in-picture. It can be controlled with these commands:
html_select cut <input_slot>- Choose which input slot to use for the graphics. It must contain both fill and key (such as the HTML graphics), otherwise, no parts of the layer will be transparent. Changing looks like a cut.html_alpha_over factor <factor>- Manually set the transparency multiplier for the graphics overlay Alpha over node. The value<factor>should be a float between 0.0 and 1.0, where 0.0 means that the graphics is completely invisible and 1.0 means that it is fully visible. Default is 0.0.html_alpha_over fade to <duration_ms>- Start an automatic fade from the current factor to a fully visible graphics over the duration of<duration_ms>milliseconds.html_alpha_over fade from <duration_ms>- Start an automatic fade from the current factor to a fully invisible graphics over the duration of<duration_ms>milliseconds.
Fade to black
The fade to black node can be controlled via the following commands:
fade_to_black factor <factor>- Manually set the blackness factor on a scale from 0.0 to 1.0, where 0.0 means not black and 1.0 means fully black output.fade_to_black fade to <duration_ms>- Start an automatic fade to a fully black output over the duration of<duration_ms>milliseconds.fade_to_black fade from <duration_ms>- Start an automatic fade to a fully visible (non-black) output over the duration of<duration_ms>milliseconds.
Audio Router commands
The same audio router is used to route specific audio channels from an input slot of the Rendering Engine to an input channel strip on the audio mixer. By default, it has no audio routes set up. The router can be controlled with the following commands:
audio map <input_slot> <channel> mono <input_strip>- Map the<channel>from input slot<input_slot>as a mono channel into input strip<input_strip>of the audio mixeraudio map <input_slot> <left_channel> stereo <input_strip>- Map the<left_channel>and<left_channel> + 1from input slot<input_slot>as a stereo pair into input strip<input_strip>of the audio mixer ’audio map reset <input_strip>- Remove the current mapping from<input_strip>of the audio mixer.
Audio commands
The audio mixer and audio router have the following data path:
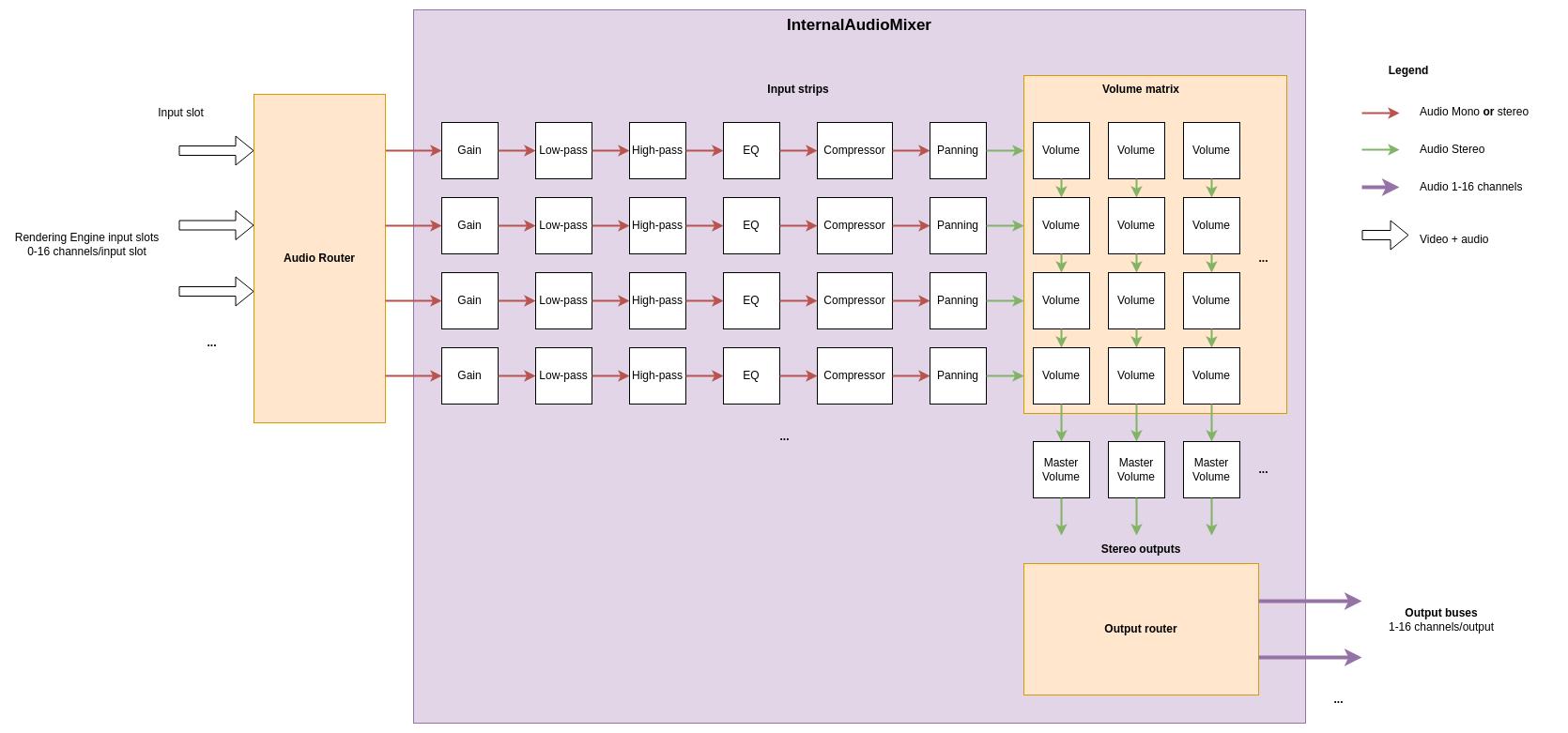
In the example picture above, three sources are connected to the input slots and four mono or stereo audio streams are picked as input to the audio mixer. The audio mixer is completely separate from the video mixer, so switching image in the video mixer will not change the audio mixer in any way. The internal audio mixer can be controlled using the following commands:
To control the pre-gain of each input strip use:
audio gain <input_strip> <level_dB>- Set the pre-gain level of a specific input in dB. Parameter<level>should be a floating point number. Default is 0.0.
To control the low-pass filter of each input strip use:
audio lpf <input_strip> freq <value>- Set the cutoff frequency for the low-pass filter in an input strip.<value>is the frequency in Hz as a floating point number. The frequency range is 20 Hz to 20 kHz. Setting a value of 20 kHz or higher will bypass the filter.audio lpf <input_strip> q <value>- Set the q-value for the low-pass filter in an input strip. The q-value controls the steepness of cutoff curve with a higher value being a steeper slope. The value is a floating point number ranging from 0.4 to 6.0. The default value is 0.7.
To control the high-pass filter of each input strip use:
audio hpf <input_strip> freq <value>- Set the cutoff frequency for the high-pass filter in an input strip.<value>is the frequency in Hz as a floating point number. The frequency range is 20 Hz to 20 kHz. Setting a value of 20 Hz or lower will bypass the filter.audio hpf <input_strip> q <value>- Set the q-value for the high-pass filter in an input strip. The q-value controls the steepness of cutoff curve with a higher value being a steeper slope. The value is a floating point number ranging from 0.4 to 6.0. The default value is 0.7.
To control the parametric equalizer of each input strip use (the equalizer has three bands):
audio eq <input_strip> <band> freq <value>- Set the frequency of a specific band in the parametric equalizer. Here<band>is a zero based index of the band, where 0 is the first band with the lowest frequency.<value>is a floating point number with the frequency in Hzaudio eq <input_strip> <band> gain <value>- Set the gain of a specific band in the parametric equalizer. Here<band>is a zero based index of the band, where 0 is the first band with the lowest frequency.<value>is a floating point number with the gain in dB.audio eq <input_strip> <band> q <value>- Set the q-value of a specific band in the parametric equalizer to shape the falloff of the band. Here<band>is a zero based index of the band, where 0 is the first band with the lowest frequency.<value>is a floating point number with the q-value where a higher value means a more pointy curve. Default value is 0.7.audio eq <input_strip> <band> type <type>- Set the type of falloff to use for a specific band in the parametric equalizer. Here<band>is a zero based index of the band, where 0 is the first band with the lowest frequency.<type>is either oflow,bandorhigh, where low and high is a low and high shelf filter and band is a band pass filter. By default, the first band is low shelf, the last band is high shelf and any bands inbetween are band pass.
To control the panning of each input strip use:
audio pan <input_strip> <factor>- Pan the mono or stereo input of an input strip to the left or right. The range of<factor>is between -1.0 and +1.0, where 0.0 means center (no panning), negative values means more to the left and positive value more to the right. Values outside this range will be clamped. A value of +/- 1.0 means that there will only be audio in the left/right channel.
To control the dynamic range compressor of each input strip use:
audio comp <input_strip> threshold <value>- Set the threshold for activation of the compressor. The threshold is a negative dB value ranging from -30 dB to 0 dB. The volume of audio which is above the threshold value will be reduced (compressed). The default value is 0 dB, i.e. only compression if the audio signal is overloaded.audio comp <input_strip> ratio <value>- Set the compression ratio for audio exceeding the loudness threshold. The value is the numerator in the compression ratio<value>:1. For instance, if the value is set to 4, the compression ratio is 4:1 and volume overshoot above the threshold will be scaled down to 25 %. The ratio numerator is a floating point number in the range from 1.0 to 24.0, with 4.0 as the default value.audio comp <input_strip> knee <value>- Set the width of the soft knee in decibels. Instead of simply turning the compression completely on or off at the threshold, the knee defines a volume range in which the compression ratio follows a curve, the “knee”. The knee is a floating point number between 0 dB and 30 dB, with a default value of 2.5 dB.audio comp <input_strip> attack <value>- Set the attack time of the compressor in milliseconds. The attack time determines how long it takes to reach the full compression after the threshold has been exceeded. The value is a floating point number in the range from 0.1 ms to 120 ms. The default value is 50 ms.audio comp <input_strip> release <value>- Set the release time of the compressor in milliseconds. The release time determines how long it takes to return to zero compression when the volume is below the compression threshold. The value is a floating point number in the range from 10 ms to 1000 ms. The default value is 200 ms.audio comp <input_strip> gain <value>- Set the make-up gain i decibels. Since the compression filter lowers the volume of louder audio sections it can be desirable to increase the gain after the filtering. The gain value increases the audio volume with the specified number of decibels. The value is a floating point number in the range from 0 dB to 24 dB. The default value is 0 dB.
To control the volume faders and master volume faders use:
audio volume <input_strip> <output> <level>- Set the volume level of a specific input in proportion to its original strength for a given output. Parameter<level>should be a floating point number, where 0.0 means that the input slot is not mixed into the output at all and 1.0 means that the volume of the input slot is kept as is for the output. The signal can also be amplified by using values > 1.0. Default is 0.0.audio mastervolume <output> <level>- Set the master volume level of an output, before the audio is clamped and converted from floating point samples to 16-bit integer samples. This can be used to avoid clipping of the audio when mixing multiple input sources. Parameter<level>is a floating point number where 0.0 means that all audio output is off, 1.0 means that the volume is not changed and any value above 1.0 means that the master volume is amplified. Default is 1.0.
HTML rendering
The Rendering Engine also features a built-in HTML renderer which uses the Chromium web browser engine to render HTML pages. The following commands can be used to create and control the HTML browser instances:
html create <input_slot> <width> <height>- Create a new HTML browser instance with the canvas size ofwidthxheightpixels and output the rendered frames to the given input slothtml close <input_slot>- Close the HTML browser instance on the given input slothtml load <input_slot> <url>- Load a new URL in the HTML browser on the given input slothtml execute <input_slot> <java script>- Execute JavaScript in the HTML browser on the given input slot. The JavaScript snippet might span over multiple lines and may contain spaces.
3 - C++ SDK
Agile Content Live C++ SDK reference.
3.1 - Classes
Classes
- namespace AclLog
A namespace for logging utilities.- class CommandLogFormatter
This class is used to format log entries for Rendering Engine commands. - class FileLocationFormatterFlag
A custom flag formatter which logs the source file location between a par of “[]”, in case the location is provided with the log call. - class ThreadNameFormatterFlag
- class CommandLogFormatter
- struct AlignedAudioFrame
AlignedAudioFrame is a frame of interleaved floating point audio samples with a given number of channels. - struct AlignedFrame
A frame of aligned data that is passed to the rendering engine from the MediaReceiver. A DataFrame contains a time stamped frame of media, which might be video, audio and auxiliary data such as subtitles. A single DataFrame can contain one or multiple types of media. Which media types are included can be probed by nullptr-checking/size checking the data members. The struct has ownership of all data pointers included. The struct includes all logic for freeing the resources held by this struct and the user should therefore just make sure the struct itself is deallocated to ensure all resources are freed. - namespace ControlDataCommon
- struct ConnectionStatus
Connection status struct containing information about a connection event. - struct Response
A response from a ControlDataReceiver to a request. The UUID tells which receiver the response is sent from. - struct StatusMessage
A status message from a ControlDataReceiver. The UUID tells which receiver the message is sent from.
- struct ConnectionStatus
- class ControlDataReceiver
A ControlDataReceiver can receive messages from a sender or another ControlDataReceiver using a network connection. It can also connect to and forward the incoming request messages to other receivers. The connections to the sender and the other receivers are controlled by an ISystemControllerInterface instance. The ControlDataReceiver has areceivingorlisteningside, as well as asendingside. The listening side can listen to one single network port and have multiple ControlDataSenders and ControlDataReceivers connected to that port to receive requests from them. On the sending side of the ControlDataReceiver, it can be connected to the listening side of other ControlDataReceivers, used to forward all incoming messages to that receiver, as well as sending its own requests.- struct IncomingRequest
An incoming request to this ControlDataReceiver. - struct ReceiverResponse
A response message to a request. - struct Settings
Settings for a ControlDataReceiver.
- struct IncomingRequest
- class ControlDataSender
A ControlDataSender can send control signals to one or more receivers using a network connection. A single ControlDataSender can connect to multiple receivers, all identified by a UUID. The class is controlled using an ISystemControllerInterface; this interface is responsible for setting up connections to receivers. The ControlDataSender can send asynchronous requests to (all) the receivers and get a response back. Each response is identified with a request ID as well as the UUID of the responding receiver. The ControlDataSender can also receive status messages from the receivers.- struct Settings
Settings for a ControlDataSender.
- struct Settings
- class DeviceMemory
RAII class for a CUDA memory buffer. - class ISystemControllerInterface
An ISystemControllerInterface is the interface between a component and the System controller controlling the component. The interface allows for two-way communication between the component and the system controller by means of sending requests and getting responses. Classes deriving from the ISystemControllerInterface should provide the component side implementation of the communication with the system controller. This interface can be inherited and implemented by developers to connect to custom system controllers, or to directly control a component programmatically, without the need for connecting to a remote server. An ISystemControllerInterface can have a parent-child relationship with other interfaces, where the children are aware of which their parent interface is. This is useful for components that provides extra features for another component, but where the components are still to be considered as two separate entities with separate connections to the System controller. - class IngestApplication
- struct Settings
- namespace IngestUtils
- class MediaReceiver
A MediaReceiver contains the logic for receiving, decoding and aligning incoming media sources from the Ingests. The aligned data is then delivered to the Rendering Engine which is also responsible for setting up the MediaReceiver. The MediaReceiver has a builtin multi view generator, which can create output streams containing composited subsets of the incoming video sources. This class is controlled using an ISystemControllerInterface provided when starting it.- struct NewStreamParameters
A struct containing information on the format of an incoming stream. - struct Settings
Settings for a MediaReceiver.
- struct NewStreamParameters
- class MediaStreamer
MediaStreamer is a class that can take a single stream of uncompressed video and/or audio frames and encode and output it in some way to some interface. This interface can either be a stream to a network or writing down the data to a file on the hard drive. This class is configured from two interfaces. The input configuration (input video resolution, frame rate, pixel format, number of audio channels…) is made through this C++ API. The output stream is then started from the System Controller. Any of these configurations can be made first. The actual stream to output will start once the first call to.- struct Configuration
The input configuration of the frames that will be sent to this MediaStreamer. The output stream configuration is made from the System controller via the ISystemControllerInterface.
- struct Configuration
- class PipelineSystemControllerInterfaceFactory
- class SystemControllerConnection
An implementation of the ISystemControllerInterface for a System controller residing in a remote server. The connection to the server uses a Websocket.- struct Settings
Settings for a SystemControllerConnection.
- struct Settings
- namespace TimeCommon
- struct TAIStatus
- struct TimeStructure
- namespace UUIDUtils
A namespace for UUID utility functions. - namespace spdlog
Updated on 2023-10-03 at 14:32:11 +0200
3.1.1 - AclLog::CommandLogFormatter
AclLog::CommandLogFormatter
This class is used to format log entries for Rendering Engine commands.
#include <AclLog.h>
Inherits from spdlog::formatter
Public Functions
| Name | |
|---|---|
| CommandLogFormatter() | |
| void | format(const spdlog::details::log_msg & msg, spdlog::memory_buf_t & dest) override |
| std::unique_ptr< spdlog::formatter > | clone() const override |
Public Functions Documentation
function CommandLogFormatter
CommandLogFormatter()
function format
void format(
const spdlog::details::log_msg & msg,
spdlog::memory_buf_t & dest
) override
function clone
std::unique_ptr< spdlog::formatter > clone() const override
Updated on 2023-10-03 at 14:32:11 +0200
3.1.2 - AclLog::FileLocationFormatterFlag
AclLog::FileLocationFormatterFlag
A custom flag formatter which logs the source file location between a par of “[]”, in case the location is provided with the log call.
#include <AclLog.h>
Inherits from spdlog::custom_flag_formatter
Public Functions
| Name | |
|---|---|
| void | format(const spdlog::details::log_msg & msg, const std::tm & , spdlog::memory_buf_t & dest) override |
| std::unique_ptr< custom_flag_formatter > | clone() const override |
Public Functions Documentation
function format
inline void format(
const spdlog::details::log_msg & msg,
const std::tm & ,
spdlog::memory_buf_t & dest
) override
function clone
inline std::unique_ptr< custom_flag_formatter > clone() const override
Updated on 2023-10-03 at 14:32:11 +0200
3.1.3 - AclLog::ThreadNameFormatterFlag
AclLog::ThreadNameFormatterFlag
Inherits from spdlog::custom_flag_formatter
Public Functions
| Name | |
|---|---|
| void | format(const spdlog::details::log_msg & , const std::tm & , spdlog::memory_buf_t & dest) override |
| std::unique_ptr< custom_flag_formatter > | clone() const override |
Public Functions Documentation
function format
inline void format(
const spdlog::details::log_msg & ,
const std::tm & ,
spdlog::memory_buf_t & dest
) override
function clone
inline std::unique_ptr< custom_flag_formatter > clone() const override
Updated on 2023-10-03 at 14:32:11 +0200
3.1.4 - AlignedAudioFrame
AlignedAudioFrame
AlignedAudioFrame is a frame of interleaved floating point audio samples with a given number of channels.
#include <AlignedFrame.h>
Public Attributes
| Name | |
|---|---|
| std::vector< float > | mSamples |
| uint8_t | mNumberOfChannels |
| uint32_t | mNumberOfSamplesPerChannel |
Public Attributes Documentation
variable mSamples
std::vector< float > mSamples;
variable mNumberOfChannels
uint8_t mNumberOfChannels = 0;
variable mNumberOfSamplesPerChannel
uint32_t mNumberOfSamplesPerChannel = 0;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.5 - AlignedFrame
AlignedFrame
A frame of aligned data that is passed to the rendering engine from the MediaReceiver. A DataFrame contains a time stamped frame of media, which might be video, audio and auxiliary data such as subtitles. A single DataFrame can contain one or multiple types of media. Which media types are included can be probed by nullptr-checking/size checking the data members. The struct has ownership of all data pointers included. The struct includes all logic for freeing the resources held by this struct and the user should therefore just make sure the struct itself is deallocated to ensure all resources are freed.
#include <AlignedFrame.h>
Public Types
| Name | |
|---|---|
| enum class | PixelFormat { kUnknown, kNv12, kP016, kUyvy, kRgba, kRgba64Le} |
Public Functions
| Name | |
|---|---|
| AlignedFrame() =default | |
| ~AlignedFrame() =default | |
| AlignedFrame(AlignedFrame const & ) =delete | |
| AlignedFrame & | operator=(AlignedFrame const & ) =delete |
Public Attributes
| Name | |
|---|---|
| int64_t | mCaptureTimestamp |
| int64_t | mRenderingTimestamp |
| std::shared_ptr< DeviceMemory > | mVideoFrame |
| PixelFormat | mPixelFormat |
| uint32_t | mFrameRateN |
| uint32_t | mFrameRateD |
| uint32_t | mWidth |
| uint32_t | mHeight |
| AlignedAudioFramePtr | mAudioFrame |
| uint32_t | mAudioSamplingFrequency |
Public Types Documentation
enum PixelFormat
| Enumerator | Value | Description |
|---|---|---|
| kUnknown | ||
| kNv12 | ||
| kP016 | ||
| kUyvy | ||
| kRgba | ||
| kRgba64Le |
Public Functions Documentation
function AlignedFrame
AlignedFrame() =default
function ~AlignedFrame
~AlignedFrame() =default
function AlignedFrame
AlignedFrame(
AlignedFrame const &
) =delete
function operator=
AlignedFrame & operator=(
AlignedFrame const &
) =delete
Public Attributes Documentation
variable mCaptureTimestamp
int64_t mCaptureTimestamp = 0;
The TAI timestamp in microseconds since the TAI epoch when this frame was captured by the ingest
variable mRenderingTimestamp
int64_t mRenderingTimestamp = 0;
The TAI timestamp in microseconds since the TAI epoch when this frame should be delivered to the rendering engine
variable mVideoFrame
std::shared_ptr< DeviceMemory > mVideoFrame = nullptr;
variable mPixelFormat
PixelFormat mPixelFormat = PixelFormat::kUnknown;
variable mFrameRateN
uint32_t mFrameRateN = 0;
variable mFrameRateD
uint32_t mFrameRateD = 0;
variable mWidth
uint32_t mWidth = 0;
variable mHeight
uint32_t mHeight = 0;
variable mAudioFrame
AlignedAudioFramePtr mAudioFrame = nullptr;
variable mAudioSamplingFrequency
uint32_t mAudioSamplingFrequency = 0;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.6 - ControlDataCommon::ConnectionStatus
ControlDataCommon::ConnectionStatus
Connection status struct containing information about a connection event.
#include <ControlDataCommon.h>
Public Functions
| Name | |
|---|---|
| ConnectionStatus() =default | |
| ConnectionStatus(ConnectionType mConnectionType, const std::string & mIp, uint16_t mPort) |
Public Attributes
| Name | |
|---|---|
| ConnectionType | mConnectionType |
| std::string | mIP |
| uint16_t | mPort |
Public Functions Documentation
function ConnectionStatus
ConnectionStatus() =default
function ConnectionStatus
inline ConnectionStatus(
ConnectionType mConnectionType,
const std::string & mIp,
uint16_t mPort
)
Public Attributes Documentation
variable mConnectionType
ConnectionType mConnectionType = ConnectionType::DISCONNECTED;
variable mIP
std::string mIP;
variable mPort
uint16_t mPort = 0;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.7 - ControlDataCommon::Response
ControlDataCommon::Response
A response from a ControlDataReceiver to a request. The UUID tells which receiver the response is sent from.
#include <ControlDataCommon.h>
Public Attributes
| Name | |
|---|---|
| std::vector< uint8_t > | mMessage |
| uint64_t | mRequestId The actual message. |
| std::string | mFromUUID The ID of the request this is a response to. |
Public Attributes Documentation
variable mMessage
std::vector< uint8_t > mMessage;
variable mRequestId
uint64_t mRequestId = 0;
The actual message.
variable mFromUUID
std::string mFromUUID;
The ID of the request this is a response to.
Updated on 2023-10-03 at 14:32:11 +0200
3.1.8 - ControlDataCommon::StatusMessage
ControlDataCommon::StatusMessage
A status message from a ControlDataReceiver. The UUID tells which receiver the message is sent from.
#include <ControlDataCommon.h>
Public Attributes
| Name | |
|---|---|
| std::vector< uint8_t > | mMessage |
| std::string | mFromUUID The actual message. |
Public Attributes Documentation
variable mMessage
std::vector< uint8_t > mMessage;
variable mFromUUID
std::string mFromUUID;
The actual message.
Updated on 2023-10-03 at 14:32:11 +0200
3.1.9 - ControlDataReceiver
ControlDataReceiver
A ControlDataReceiver can receive messages from a sender or another ControlDataReceiver using a network connection. It can also connect to and forward the incoming request messages to other receivers. The connections to the sender and the other receivers are controlled by an ISystemControllerInterface instance. The ControlDataReceiver has a receiving or listening side, as well as a sending side. The listening side can listen to one single network port and have multiple ControlDataSenders and ControlDataReceivers connected to that port to receive requests from them. On the sending side of the ControlDataReceiver, it can be connected to the listening side of other ControlDataReceivers, used to forward all incoming messages to that receiver, as well as sending its own requests. More…
#include <ControlDataReceiver.h>
Public Classes
| Name | |
|---|---|
| struct | IncomingRequest An incoming request to this ControlDataReceiver. |
| struct | ReceiverResponse A response message to a request. |
| struct | Settings Settings for a ControlDataReceiver. |
Public Functions
| Name | |
|---|---|
| ControlDataReceiver() Default constructor, creates an empty object. | |
| ~ControlDataReceiver() Destructor. Will disconnect from the connected receivers and close the System controller connection. | |
| bool | configure(const std::shared_ptr< ISystemControllerInterface > & controllerInterface, const Settings & settings) Configure this ControlDataReceiver and connect it to the System Controller. This method will fail in case the ISystemControllerInterface has already been connected to the controller by another component, as such interface can only be used by one component. |
| bool | sendStatusMessageToSender(const std::vector< uint8_t > & message) Send a status message to the (directly or indirectly) connected ControlDataSender. In case this ControlDataReceiver has another ControlDataReceiver as sender, that receiver will forward the status message to the sender. |
| bool | sendRequestToReceivers(const std::vector< uint8_t > & request, uint64_t & requestId) Send a request to the connected ControlDataReceivers asynchronously. This request will only be sent to ControlDataReceivers on the sending side of this receiver. In case a receiver is located between this ControlDataReceiver and the sender, neither of those will see this request. The response will be sent to the response callback asynchronously. |
| bool | sendMultiRequestToReceivers(const std::vector< std::vector< uint8_t » & request, uint64_t & requestId) Send a multi-message request to the connected ControlDataReceivers asynchronously. This request will only be sent to ControlDataReceivers on the sending side of this receiver. In case a receiver is located between this ControlDataReceiver and the sender, neither of those will see this request. The response will be sent to the response callback asynchronously. |
| ControlDataReceiver(ControlDataReceiver const & ) =delete | |
| ControlDataReceiver & | operator=(ControlDataReceiver const & ) =delete |
| std::string | getVersion() Get application version. |
| std::string | getBuildInfo() Get application build information. |
Detailed Description
class ControlDataReceiver;
A ControlDataReceiver can receive messages from a sender or another ControlDataReceiver using a network connection. It can also connect to and forward the incoming request messages to other receivers. The connections to the sender and the other receivers are controlled by an ISystemControllerInterface instance. The ControlDataReceiver has a receiving or listening side, as well as a sending side. The listening side can listen to one single network port and have multiple ControlDataSenders and ControlDataReceivers connected to that port to receive requests from them. On the sending side of the ControlDataReceiver, it can be connected to the listening side of other ControlDataReceivers, used to forward all incoming messages to that receiver, as well as sending its own requests.
Each ControlDataReceiver can be configured to have a certain message delay. This delay parameter is set when the System controller instructs the ControlDataReceiver to start listening for incoming connections from senders (or sending ControlDataReceiver). Each incoming request will then be delayed and delivered according to the parameter, compared to the send timestamp in the message. In case multiple receivers are chained, like sender->receiver1->receiver2, receiver1 will delay the incoming messages from the sender based on when they were sent from the sender. Furthermore, receiver2 will delay them compared to when they were sent from receiver1.
A ControlDataReceiver can send status messages back to the sender. In case of chained receivers, the message will be forwarded back to the sender. A user of the ControlDataReceiver can register callbacks to receive requests and status messages. There is also an optional “preview” callback that is useful in case the incoming messages are delayed (have a delay > 0). This callback will then be called as soon as the request message arrives, to allow the user to prepare for when the actual delayed request callback is called.
Public Functions Documentation
function ControlDataReceiver
ControlDataReceiver()
Default constructor, creates an empty object.
function ~ControlDataReceiver
~ControlDataReceiver()
Destructor. Will disconnect from the connected receivers and close the System controller connection.
function configure
bool configure(
const std::shared_ptr< ISystemControllerInterface > & controllerInterface,
const Settings & settings
)
Configure this ControlDataReceiver and connect it to the System Controller. This method will fail in case the ISystemControllerInterface has already been connected to the controller by another component, as such interface can only be used by one component.
Parameters:
- controllerInterface The interface to the System controller, used for communicating with this ControlDataReceiver
- settings The settings to use for this ControlDataReceiver
Return: True on success, false otherwise
function sendStatusMessageToSender
bool sendStatusMessageToSender(
const std::vector< uint8_t > & message
)
Send a status message to the (directly or indirectly) connected ControlDataSender. In case this ControlDataReceiver has another ControlDataReceiver as sender, that receiver will forward the status message to the sender.
Parameters:
- message The status message
Return: True in case the message was sent successfully, false otherwise.
function sendRequestToReceivers
bool sendRequestToReceivers(
const std::vector< uint8_t > & request,
uint64_t & requestId
)
Send a request to the connected ControlDataReceivers asynchronously. This request will only be sent to ControlDataReceivers on the sending side of this receiver. In case a receiver is located between this ControlDataReceiver and the sender, neither of those will see this request. The response will be sent to the response callback asynchronously.
Parameters:
- request The request message
- requestId The unique identifier of this request. Used to identify the async response.
Return: True if the request was successfully sent, false otherwise
function sendMultiRequestToReceivers
bool sendMultiRequestToReceivers(
const std::vector< std::vector< uint8_t >> & request,
uint64_t & requestId
)
Send a multi-message request to the connected ControlDataReceivers asynchronously. This request will only be sent to ControlDataReceivers on the sending side of this receiver. In case a receiver is located between this ControlDataReceiver and the sender, neither of those will see this request. The response will be sent to the response callback asynchronously.
Parameters:
- request The request message
- requestId The unique identifier of this request. Used to identify the async response.
Return: True if the request was successfully sent, false otherwise
function ControlDataReceiver
ControlDataReceiver(
ControlDataReceiver const &
) =delete
function operator=
ControlDataReceiver & operator=(
ControlDataReceiver const &
) =delete
function getVersion
static std::string getVersion()
Get application version.
Return: a string with the current version, e.g. “1.0.0”
function getBuildInfo
static std::string getBuildInfo()
Get application build information.
Return: a string with the current build information such as git hashes of all direct dependencies
Updated on 2023-10-03 at 14:32:11 +0200
3.1.10 - ControlDataReceiver::IncomingRequest
ControlDataReceiver::IncomingRequest
An incoming request to this ControlDataReceiver.
#include <ControlDataReceiver.h>
Public Attributes
| Name | |
|---|---|
| std::vector< std::vector< uint8_t > > | mMessages |
| std::string | mSenderUUID The actual messages. |
| std::string | mRequesterUUID UUID of the sender/forwarder that sent the request to this ControlDataReceiver. |
| uint64_t | mRequestID UUID of the requester (the original sender, creating the request) |
| int64_t | mSenderTimestampUs The requester’s unique id of this request. |
| int64_t | mDeliveryTimestampUs The TAI timestamp when this message was sent from the sender/forwarder in micro sec since TAI epoch. |
Public Attributes Documentation
variable mMessages
std::vector< std::vector< uint8_t > > mMessages;
variable mSenderUUID
std::string mSenderUUID;
The actual messages.
variable mRequesterUUID
std::string mRequesterUUID;
UUID of the sender/forwarder that sent the request to this ControlDataReceiver.
variable mRequestID
uint64_t mRequestID = 0;
UUID of the requester (the original sender, creating the request)
variable mSenderTimestampUs
int64_t mSenderTimestampUs =
0;
The requester’s unique id of this request.
variable mDeliveryTimestampUs
int64_t mDeliveryTimestampUs =
0;
The TAI timestamp when this message was sent from the sender/forwarder in micro sec since TAI epoch.
Updated on 2023-10-03 at 14:32:11 +0200
3.1.11 - ControlDataReceiver::ReceiverResponse
ControlDataReceiver::ReceiverResponse
A response message to a request.
#include <ControlDataReceiver.h>
Public Attributes
| Name | |
|---|---|
| std::vector< uint8_t > | mMessage |
Public Attributes Documentation
variable mMessage
std::vector< uint8_t > mMessage;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.12 - ControlDataReceiver::Settings
ControlDataReceiver::Settings
Settings for a ControlDataReceiver.
#include <ControlDataReceiver.h>
Public Attributes
| Name | |
|---|---|
| std::function< void(const IncomingRequest &)> | mPreviewIncomingRequestCallback |
| std::function< ReceiverResponse(const IncomingRequest &)> | mIncomingRequestCallback |
| std::function< void(const ControlDataCommon::ConnectionStatus &)> | mConnectionStatusCallback |
| std::function< void(const ControlDataCommon::Response &)> | mResponseCallback Callback for connection events. |
Public Attributes Documentation
variable mPreviewIncomingRequestCallback
std::function< void(const IncomingRequest &)> mPreviewIncomingRequestCallback;
Callback called as soon as this ControlDataReceiver gets the request, as a “preview” of what requests will be delievered.
variable mIncomingRequestCallback
std::function< ReceiverResponse(const IncomingRequest &)> mIncomingRequestCallback;
The actual callback used when this ControlDataReceiver gets a request and wants a response back. This callback will delay and deliver the request according to this receiver’s configured delay.
variable mConnectionStatusCallback
std::function< void(const ControlDataCommon::ConnectionStatus &)> mConnectionStatusCallback;
variable mResponseCallback
std::function< void(const ControlDataCommon::Response &)> mResponseCallback;
Callback for connection events.
Updated on 2023-10-03 at 14:32:11 +0200
3.1.13 - ControlDataSender
ControlDataSender
A ControlDataSender can send control signals to one or more receivers using a network connection. A single ControlDataSender can connect to multiple receivers, all identified by a UUID. The class is controlled using an ISystemControllerInterface; this interface is responsible for setting up connections to receivers. The ControlDataSender can send asynchronous requests to (all) the receivers and get a response back. Each response is identified with a request ID as well as the UUID of the responding receiver. The ControlDataSender can also receive status messages from the receivers.
#include <ControlDataSender.h>
Public Classes
| Name | |
|---|---|
| struct | Settings Settings for a ControlDataSender. |
Public Functions
| Name | |
|---|---|
| ControlDataSender() Default constructor, creates an empty object. | |
| ~ControlDataSender() Destructor. Will disconnect from the connected receivers and close the System controller connection. | |
| bool | configure(const std::shared_ptr< ISystemControllerInterface > & controllerInterface, const Settings & settings) Configure this ControlDataSender and connect it to the System Controller. This method will fail in case the ISystemControllerInterface has already been connected to the controller by another component, as such interface can only be used by one component. |
| bool | sendRequestToReceivers(const std::vector< uint8_t > & request, uint64_t & requestId) Send a request to all the connected ControlDataReceivers asynchronously. The responses will be sent to the response callback. |
| bool | sendMultiRequestToReceivers(const std::vector< std::vector< uint8_t » & request, uint64_t & requestId) Send a multi-message request to all the connected ControlDataReceivers asynchronously. The responses will be sent to the response callback. |
| ControlDataSender(ControlDataSender const & ) =delete | |
| ControlDataSender & | operator=(ControlDataSender const & ) =delete |
| std::string | getVersion() Get application version. |
| std::string | getGitRevision() Get git revision which application was built on. |
| std::string | getBuildInfo() Get application build information. |
Public Functions Documentation
function ControlDataSender
ControlDataSender()
Default constructor, creates an empty object.
function ~ControlDataSender
~ControlDataSender()
Destructor. Will disconnect from the connected receivers and close the System controller connection.
function configure
bool configure(
const std::shared_ptr< ISystemControllerInterface > & controllerInterface,
const Settings & settings
)
Configure this ControlDataSender and connect it to the System Controller. This method will fail in case the ISystemControllerInterface has already been connected to the controller by another component, as such interface can only be used by one component.
Parameters:
- controllerInterface The interface to the System controller, used for communicating with this ControlDataSender
- settings The Settings to use for this ControlDataSender
Return: True on success, false otherwise
function sendRequestToReceivers
bool sendRequestToReceivers(
const std::vector< uint8_t > & request,
uint64_t & requestId
)
Send a request to all the connected ControlDataReceivers asynchronously. The responses will be sent to the response callback.
Parameters:
- request The request message
- requestId The unique identifier of this request. Used to identify the async responses.
Return: True if the request was successfully sent, false otherwise
function sendMultiRequestToReceivers
bool sendMultiRequestToReceivers(
const std::vector< std::vector< uint8_t >> & request,
uint64_t & requestId
)
Send a multi-message request to all the connected ControlDataReceivers asynchronously. The responses will be sent to the response callback.
Parameters:
- request The request message
- requestId The unique identifier of this request. Used to identify the async responses.
Return: True if the request was successfully sent, false otherwise
function ControlDataSender
ControlDataSender(
ControlDataSender const &
) =delete
function operator=
ControlDataSender & operator=(
ControlDataSender const &
) =delete
function getVersion
static std::string getVersion()
Get application version.
Return: a string with the current version, e.g. “1.0.0”
function getGitRevision
static std::string getGitRevision()
Get git revision which application was built on.
Return: a string with the current git revision, e.g. “v2.1.0-231-gcd012ab”, followed by “-dirty” in case there are changes made to the Git repo.
function getBuildInfo
static std::string getBuildInfo()
Get application build information.
Return: a string with the current build information such as git hashes of all direct dependencies
Updated on 2023-10-03 at 14:32:11 +0200
3.1.14 - ControlDataSender::Settings
ControlDataSender::Settings
Settings for a ControlDataSender.
#include <ControlDataSender.h>
Public Attributes
| Name | |
|---|---|
| std::function< void(const ControlDataCommon::ConnectionStatus &)> | mConnectionStatusCallback |
| std::function< void(const ControlDataCommon::Response &)> | mResponseCallback |
| std::function< void(const ControlDataCommon::StatusMessage &)> | mStatusMessageCallback |
Public Attributes Documentation
variable mConnectionStatusCallback
std::function< void(const ControlDataCommon::ConnectionStatus &)> mConnectionStatusCallback;
variable mResponseCallback
std::function< void(const ControlDataCommon::Response &)> mResponseCallback;
variable mStatusMessageCallback
std::function< void(const ControlDataCommon::StatusMessage &)> mStatusMessageCallback;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.15 - DeviceMemory
DeviceMemory
RAII class for a CUDA memory buffer.
#include <DeviceMemory.h>
Public Functions
| Name | |
|---|---|
| DeviceMemory() =default Default constructor, creates an empty object, without allocating any memory on the device. | |
| DeviceMemory(size_t numberOfBytes) Constructor allocating the required number of bytes. | |
| DeviceMemory(size_t numberOfBytes, cudaStream_t cudaStream) Constructor allocating the required number of bytes by making an async allocation. The allocation will be put in the given CUDA stream. | |
| DeviceMemory(void * deviceMemory) Constructor taking ownership of an already allocated CUDA memory pointer. This class will free the pointer once it goes out of scope. | |
| bool | allocateMemory(size_t numberOfBytes) Allocates device memory. The memory allocated will automatically be freed by the destructor. |
| bool | allocateMemoryAsync(size_t numberOfBytes, cudaStream_t cudaStream) Allocates device memory. The memory allocated will automatically be freed by the destructor. |
| bool | reallocateMemory(size_t numberOfBytes) Reallocates device memory. Already existing memory allocation will be freed before the new allocation is made. In case this DeviceMemory has no earlier memory allocation, this method will just allocate new CUDA memory and return a success status. |
| bool | allocateAndResetMemory(size_t numberOfBytes) Allocates device memory and resets all bytes to zeroes. The memory allocated will automatically be freed by the destructor. |
| bool | allocateAndResetMemoryAsync(size_t numberOfBytes, cudaStream_t cudaStream) Allocates device memory and resets all bytes to zeroes. The memory allocated will automatically be freed by the destructor. |
| bool | freeMemory() Free the device memory held by this class. Calling this when no memory is allocated is a no-op. |
| bool | freeMemoryAsync(cudaStream_t cudaStream) Deallocate memory asynchronously, in a given CUDA stream. Calling this when no memory is allocated is a no-op. |
| void | setFreeingCudaStream(cudaStream_t cudaStream) Set which CUDA stream to use for freeing this DeviceMemory. In case the DeviceMemory already holds a CUDA stream to use for freeing the memory, this will be overwritten. |
| ~DeviceMemory() Destructor, frees the internal CUDA memory. | |
| template T * | getDevicePointer() const |
| size_t | getSize() const |
| DeviceMemory(DeviceMemory && other) | |
| DeviceMemory & | operator=(DeviceMemory && other) |
| void | swap(DeviceMemory & other) |
| DeviceMemory(DeviceMemory const & ) =delete DeviceMemory is not copyable. | |
| DeviceMemory | operator=(DeviceMemory const & ) =delete |
Public Functions Documentation
function DeviceMemory
DeviceMemory() =default
Default constructor, creates an empty object, without allocating any memory on the device.
function DeviceMemory
explicit DeviceMemory(
size_t numberOfBytes
)
Constructor allocating the required number of bytes.
Parameters:
- numberOfBytes Number of bytes to allocate
Exceptions:
- std::runtime_error In case the allocation failed
function DeviceMemory
explicit DeviceMemory(
size_t numberOfBytes,
cudaStream_t cudaStream
)
Constructor allocating the required number of bytes by making an async allocation. The allocation will be put in the given CUDA stream.
Parameters:
- size Number of bytes to allocate
- cudaStream The CUDA stream to put the async allocation in. A reference to this stream will also be saved internally to be used to asynchronously free them memory when the instance goes out of scope.
Exceptions:
- std::runtime_error In case the async allocation failed to be put in queue.
See: freeMemoryAsync method is not explicitly called, the memory will be freed synchronously when this DeviceMemory instance goes out of scope, meaning that the entire GPU is synchronized, which will impact performance negatively.
Note:
- The method will return as soon as the allocation is put in queue in the CUDA stream, i.e. before the actual allocation is made. Using this DeviceMemory is only valid as long as it is used in the same CUDA stream, or in case another stream is used, only if that stream is synchronized first with respect to
cudaStream. - In case the
function DeviceMemory
explicit DeviceMemory(
void * deviceMemory
)
Constructor taking ownership of an already allocated CUDA memory pointer. This class will free the pointer once it goes out of scope.
Parameters:
- deviceMemory CUDA memory pointer to take ownership over.
function allocateMemory
bool allocateMemory(
size_t numberOfBytes
)
Allocates device memory. The memory allocated will automatically be freed by the destructor.
Parameters:
- numberOfBytes Number of bytes to allocate
Return: True on success, false if there is already memory allocated by this instance, or if the CUDA malloc failed.
function allocateMemoryAsync
bool allocateMemoryAsync(
size_t numberOfBytes,
cudaStream_t cudaStream
)
Allocates device memory. The memory allocated will automatically be freed by the destructor.
Parameters:
- numberOfBytes Number of bytes to allocate
- cudaStream The CUDA stream to use for the allocation. A reference to this stream will also be saved internally to be used to asynchronously free them memory when the instance goes out of scope.
Return: True on success, false if there is already memory allocated by this instance, or if the CUDA malloc failed.
function reallocateMemory
bool reallocateMemory(
size_t numberOfBytes
)
Reallocates device memory. Already existing memory allocation will be freed before the new allocation is made. In case this DeviceMemory has no earlier memory allocation, this method will just allocate new CUDA memory and return a success status.
Parameters:
- numberOfBytes Number of bytes to allocate in the new allocation
Return: True on success, false if CUDA free or CUDA malloc failed.
function allocateAndResetMemory
bool allocateAndResetMemory(
size_t numberOfBytes
)
Allocates device memory and resets all bytes to zeroes. The memory allocated will automatically be freed by the destructor.
Parameters:
- numberOfBytes Number of bytes to allocate
Return: True on success, false if there is already memory allocated by this instance, or if any of the CUDA operations failed.
function allocateAndResetMemoryAsync
bool allocateAndResetMemoryAsync(
size_t numberOfBytes,
cudaStream_t cudaStream
)
Allocates device memory and resets all bytes to zeroes. The memory allocated will automatically be freed by the destructor.
Parameters:
- numberOfBytes Number of bytes to allocate
- cudaStream The CUDA stream to use for the allocation and resetting. A reference to this stream will also be saved internally to be used to asynchronously free them memory when the instance goes out of scope.
Return: True on success, false if there is already memory allocated by this instance, or if any of the CUDA operations failed.
function freeMemory
bool freeMemory()
Free the device memory held by this class. Calling this when no memory is allocated is a no-op.
See: freeMemoryAsync instead.
Return: True in case the memory was successfully freed (or not allocated to begin with), false otherwise.
Note: This method will free the memory in an synchronous fashion, synchronizing the entire CUDA context and ignoring the internally saved CUDA stream reference in case one exist. For async freeing of the memory, use
function freeMemoryAsync
bool freeMemoryAsync(
cudaStream_t cudaStream
)
Deallocate memory asynchronously, in a given CUDA stream. Calling this when no memory is allocated is a no-op.
Parameters:
- cudaStream The CUDA stream to free the memory asynchronously in
Return: True in case the memory deallocation request was successfully put in queue in the CUDA stream.
Note:
- The method will return as soon as the deallocation is put in queue in the CUDA stream, i.e. before the actual deallocation is made.
- It is the programmer’s responsibility to ensure this DeviceMemory is not used in another CUDA stream before this method is called. In case it is used in another CUDA stream, sufficient synchronization must be made before calling this method (and a very good reason given for not freeing the memory in that CUDA stream instead)
function setFreeingCudaStream
void setFreeingCudaStream(
cudaStream_t cudaStream
)
Set which CUDA stream to use for freeing this DeviceMemory. In case the DeviceMemory already holds a CUDA stream to use for freeing the memory, this will be overwritten.
Parameters:
- cudaStream The new CUDA stream to use for freeing the memory when the destructor is called.
Note: It is the programmer’s responsibility to ensure this DeviceMemory is not used in another CUDA stream before this instance is destructed. In case it is used in another CUDA stream, sufficient synchronization must be made before setting this as the new CUDA stream to use when freeing the memory.
function ~DeviceMemory
~DeviceMemory()
Destructor, frees the internal CUDA memory.
function getDevicePointer
template <typename T =uint8_t>
inline T * getDevicePointer() const
Template Parameters:
- T The pointer type to return
Return: the CUDA memory pointer handled by this class. Nullptr in case no memory is allocated.
function getSize
size_t getSize() const
Return: The size of the CUDA memory allocation held by this class.
function DeviceMemory
DeviceMemory(
DeviceMemory && other
)
function operator=
DeviceMemory & operator=(
DeviceMemory && other
)
function swap
void swap(
DeviceMemory & other
)
function DeviceMemory
DeviceMemory(
DeviceMemory const &
) =delete
DeviceMemory is not copyable.
function operator=
DeviceMemory operator=(
DeviceMemory const &
) =delete
Updated on 2023-10-03 at 14:32:11 +0200
3.1.16 - IngestApplication
IngestApplication
Public Classes
| Name | |
|---|---|
| struct | Settings |
Public Functions
| Name | |
|---|---|
| IngestApplication() Constructor, creates an empty IngestApplication without starting it. | |
| ~IngestApplication() Destructor. | |
| bool | start(const std::shared_ptr< ISystemControllerInterface > & controllerInterface, const Settings & settings) Start this IngestApplication given an interface to the System Controller and an UUID. |
| bool | stop() Stop this IngestApplication. |
| std::string | getVersion() Get application version. |
| std::string | getGitRevision() Get git revision which application was built on. |
| std::string | getBuildInfo() Get application build information. |
| std::string | getLibraryVersions() Get the versions of the libraries available at runtime, among others, CUDA version, BMD and NDI versions. |
Public Functions Documentation
function IngestApplication
IngestApplication()
Constructor, creates an empty IngestApplication without starting it.
function ~IngestApplication
~IngestApplication()
Destructor.
function start
bool start(
const std::shared_ptr< ISystemControllerInterface > & controllerInterface,
const Settings & settings
)
Start this IngestApplication given an interface to the System Controller and an UUID.
Parameters:
- controllerInterface The interface for communication with the System Controller
- settings The settings for the IngestApplication
Return: True if the IngestApplication was successfully started, false otherwise
function stop
bool stop()
Stop this IngestApplication.
Return: True if the IngestApplication was successfully stopped, false otherwise
function getVersion
static std::string getVersion()
Get application version.
Return: a string with the current version, e.g. “1.0.0”
function getGitRevision
static std::string getGitRevision()
Get git revision which application was built on.
Return: a string with the current git revision, e.g. “v1.0.0”, or “v2.1.0-231-gcd012ab”
function getBuildInfo
static std::string getBuildInfo()
Get application build information.
Return: a string with the current build information such as git hashes of all direct dependencies
function getLibraryVersions
static std::string getLibraryVersions()
Get the versions of the libraries available at runtime, among others, CUDA version, BMD and NDI versions.
Return: a string with the currently found versions of the libraries used by this application
Updated on 2023-10-03 at 14:32:11 +0200
3.1.17 - IngestApplication::Settings
IngestApplication::Settings
Updated on 2023-10-03 at 14:32:11 +0200
3.1.18 - ISystemControllerInterface
ISystemControllerInterface
An ISystemControllerInterface is the interface between a component and the System controller controlling the component. The interface allows for two-way communication between the component and the system controller by means of sending requests and getting responses. Classes deriving from the ISystemControllerInterface should provide the component side implementation of the communication with the system controller. This interface can be inherited and implemented by developers to connect to custom system controllers, or to directly control a component programmatically, without the need for connecting to a remote server. An ISystemControllerInterface can have a parent-child relationship with other interfaces, where the children are aware of which their parent interface is. This is useful for components that provides extra features for another component, but where the components are still to be considered as two separate entities with separate connections to the System controller.
#include <ISystemControllerInterface.h>
Inherited by SystemControllerConnection
Public Classes
| Name | |
|---|---|
| struct | Callbacks A struct containing the callbacks that needs to be registered by the component using this interface. |
| struct | Response A response to a request, consists of a status code and an (optional) parameters JSON object. |
Public Types
| Name | |
|---|---|
| enum class uint32_t | StatusCode { SUCCESS = 3001, TOO_MANY_REQUESTS = 3101, UUID_ALREADY_REGISTERED = 3201, FORMAT_ERROR = 3202, ALREADY_CONFIGURED = 3203, OUT_OF_RESOURCES = 3204, NOT_FOUND = 3205, INTERNAL_ERROR = 3206, CONNECTION_FAILED = 3207, TIMEOUT_EXCEEDED = 3208, KEY_MISMATCH = 3209, UNKNOWN_REQUEST = 3210, MALFORMED_REQUEST = 3211, ALREADY_IN_USE = 3212} Status codes used in JSON response messages for Websockets. These are starting at 3000 since the 1000 - 2000 range is taken up by the Spec: https://datatracker.ietf.org/doc/html/rfc6455#section-7.4.1. |
Public Functions
| Name | |
|---|---|
| virtual | ~ISystemControllerInterface() =default Virtual destructor. |
| virtual Response | sendRequest(const std::string & request, const nlohmann::json & parameters) =0 Send a request with some JSON parameters to the controller and await the response. |
| virtual bool | registerRequestCallback(const Callbacks & callbacks) =0 Register the callbacks to call for events in this class. |
| virtual bool | connect() =0 Connect to the System controller. |
| virtual bool | disconnect() =0 Disconnect from the System controller. |
| virtual bool | isConnected() const =0 |
| virtual std::string | getUUID() const =0 |
| virtual bool | hasParent() const =0 |
| virtual std::shared_ptr< ISystemControllerInterface > | getParentInterface() const =0 |
Public Types Documentation
enum StatusCode
| Enumerator | Value | Description |
|---|---|---|
| SUCCESS | 3001 | 3000-3099 Info/Notifications |
| TOO_MANY_REQUESTS | 3101 | 3100-3199 Warnings |
| UUID_ALREADY_REGISTERED | 3201 | 3200-3299 Error |
| FORMAT_ERROR | 3202 | |
| ALREADY_CONFIGURED | 3203 | |
| OUT_OF_RESOURCES | 3204 | |
| NOT_FOUND | 3205 | |
| INTERNAL_ERROR | 3206 | |
| CONNECTION_FAILED | 3207 | |
| TIMEOUT_EXCEEDED | 3208 | |
| KEY_MISMATCH | 3209 | |
| UNKNOWN_REQUEST | 3210 | |
| MALFORMED_REQUEST | 3211 | |
| ALREADY_IN_USE | 3212 |
Status codes used in JSON response messages for Websockets. These are starting at 3000 since the 1000 - 2000 range is taken up by the Spec: https://datatracker.ietf.org/doc/html/rfc6455#section-7.4.1.
Public Functions Documentation
function ~ISystemControllerInterface
virtual ~ISystemControllerInterface() =default
Virtual destructor.
function sendRequest
virtual Response sendRequest(
const std::string & request,
const nlohmann::json & parameters
) =0
Send a request with some JSON parameters to the controller and await the response.
Parameters:
- request The name of the request command
- parameters The parameters part of the JSON message
Return: The response from the controller.
Reimplemented by: SystemControllerConnection::sendRequest
function registerRequestCallback
virtual bool registerRequestCallback(
const Callbacks & callbacks
) =0
Register the callbacks to call for events in this class.
Parameters:
- callbacks The callbacks to use when events in this class happen
Return: True on successful registration, false if some callback is not set or if already connected
Reimplemented by: SystemControllerConnection::registerRequestCallback
function connect
virtual bool connect() =0
Connect to the System controller.
Return: True on successful connection, false on error or if already connected
Reimplemented by: SystemControllerConnection::connect
function disconnect
virtual bool disconnect() =0
Disconnect from the System controller.
Return: True on successful disconnection, false on error or if not connected
Reimplemented by: SystemControllerConnection::disconnect
function isConnected
virtual bool isConnected() const =0
Return: True if connected to the System controller, false otherwise
Reimplemented by: SystemControllerConnection::isConnected
function getUUID
virtual std::string getUUID() const =0
Return: The UUID of this interface to the System controller
Reimplemented by: SystemControllerConnection::getUUID
function hasParent
virtual bool hasParent() const =0
Return: True if this component has a parent ISystemControllerInterface, false otherwise
Reimplemented by: SystemControllerConnection::hasParent
function getParentInterface
virtual std::shared_ptr< ISystemControllerInterface > getParentInterface() const =0
Return: A pointer to parent’s ISystemControllerInterface, if any. Returns nullptr in case there is no parent
Reimplemented by: SystemControllerConnection::getParentInterface
Updated on 2023-10-03 at 14:32:11 +0200
3.1.19 - ISystemControllerInterface::Callbacks
ISystemControllerInterface::Callbacks
A struct containing the callbacks that needs to be registered by the component using this interface.
#include <ISystemControllerInterface.h>
Public Attributes
| Name | |
|---|---|
| std::function< Response(const std::string &, const nlohmann::json &)> | mRequestCallback |
| std::function< void(uint32_t, const std::string &, const std::error_code &)> | mConnectionClosedCallback |
Public Attributes Documentation
variable mRequestCallback
std::function< Response(const std::string &, const nlohmann::json &)> mRequestCallback;
variable mConnectionClosedCallback
std::function< void(uint32_t, const std::string &, const std::error_code &)> mConnectionClosedCallback;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.20 - ISystemControllerInterface::Response
ISystemControllerInterface::Response
A response to a request, consists of a status code and an (optional) parameters JSON object.
#include <ISystemControllerInterface.h>
Public Attributes
| Name | |
|---|---|
| StatusCode | mCode |
| nlohmann::json | mParameters |
Public Attributes Documentation
variable mCode
StatusCode mCode;
variable mParameters
nlohmann::json mParameters;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.21 - MediaReceiver
MediaReceiver
A MediaReceiver contains the logic for receiving, decoding and aligning incoming media sources from the Ingests. The aligned data is then delivered to the Rendering Engine which is also responsible for setting up the MediaReceiver. The MediaReceiver has a builtin multi view generator, which can create output streams containing composited subsets of the incoming video sources. This class is controlled using an ISystemControllerInterface provided when starting it.
#include <MediaReceiver.h>
Public Classes
| Name | |
|---|---|
| struct | NewStreamParameters A struct containing information on the format of an incoming stream. |
| struct | Settings Settings for a MediaReceiver. |
Public Types
| Name | |
|---|---|
| enum class uint32_t | TallyBorderColor { kNone, kRed, kGreen, kYellow} Available colors for tally border in multi view. |
Public Functions
| Name | |
|---|---|
| MediaReceiver() Default constructor. | |
| ~MediaReceiver() Default destructor. | |
| bool | start(const std::shared_ptr< ISystemControllerInterface > & controllerInterface, CUcontext cudaContext, const Settings & settings) Start the MediaReceiver. This method will call connect on the System controller interface and set up the callbacks from the interface to call internal methods. |
| void | stop() Stop the MediaReceiver. |
| std::function< void(const AlignedFramePtr &)> | getCustomMultiViewSourceInput(uint32_t inputSlot, const std::string & name ="") This method allows the Rendering Engine to provide custom input sources to the Multi-view generator to send video streams that can be added to the multi-views. This could for instance be used for adding a “preview” of the video stream the rendering engine is about to cut to. |
| bool | removeCustomMultiViewSourceInput(uint32_t inputSlot) Remove a custom multi-view generator source input earlier registered using the getCustomMultiViewSourceInput method. |
| void | setTallyBorder(uint32_t inputSlot, TallyBorderColor color) Set tally border color in the multi-views for a specific input slot. |
| void | clearTallyBorder(uint32_t inputSlot) Remove tally border in the multi-views for a specific input slot. |
| void | clearAllTallyBorders() Remove all tally borders. |
| MediaReceiver::TallyBorderColor | getTallyBorder(uint32_t inputSlot) const get tally border color for an input slot |
| MediaReceiver(MediaReceiver const & ) =delete MediaReceiver is neither copyable nor movable. | |
| MediaReceiver(MediaReceiver && ) =delete | |
| MediaReceiver & | operator=(MediaReceiver const & ) =delete |
| MediaReceiver & | operator=(MediaReceiver && ) =delete |
| std::string | getVersion() Get application version. |
| std::string | getBuildInfo() Get application build information. |
| std::string | getLibraryVersions() Get versions of the libraries available at runtime, among others, CUDA runtime and driver versions. |
Public Types Documentation
enum TallyBorderColor
| Enumerator | Value | Description |
|---|---|---|
| kNone | ||
| kRed | ||
| kGreen | ||
| kYellow |
Available colors for tally border in multi view.
Public Functions Documentation
function MediaReceiver
MediaReceiver()
Default constructor.
function ~MediaReceiver
~MediaReceiver()
Default destructor.
function start
bool start(
const std::shared_ptr< ISystemControllerInterface > & controllerInterface,
CUcontext cudaContext,
const Settings & settings
)
Start the MediaReceiver. This method will call connect on the System controller interface and set up the callbacks from the interface to call internal methods.
Parameters:
- controllerInterface The ISystemControllerInterface to use for this MediaReceiver. The interface should be configured (Such as setting the IP address and port of the System Controller if a server based System Controller is used) but not connected before passed to this method. This method will internally set the callbacks before connecting to the controller. If the controller is already connected or if the controller is not configured, this method will return false. This class will take ownership of the smart pointer.
- cudaContext The CUDA context to use for this MediaReceiver. The frames will delivered as CUDA pointers, valid in this context, and the multi-view generator will use this context for rendering and encoding.
- settings The settings to use for the MediaReceiver.
Return: True if the MediaReceiver was started successfully, false otherwise.
function stop
void stop()
Stop the MediaReceiver.
function getCustomMultiViewSourceInput
std::function< void(const AlignedFramePtr &)> getCustomMultiViewSourceInput(
uint32_t inputSlot,
const std::string & name =""
)
This method allows the Rendering Engine to provide custom input sources to the Multi-view generator to send video streams that can be added to the multi-views. This could for instance be used for adding a “preview” of the video stream the rendering engine is about to cut to.
Parameters:
- inputSlot The input slot this source will be “plugged in” to. The custom input sources share the input slots with the streams connected from Ingests. This means that it is probably a good idea to use higher numbered slots for these custom inputs, such as numbers from 1000, so that the lower numbers, 1 and up, can be used by the connected video cameras, as the input slot number will also be used when cutting.
- name Optional human readable name of this stream, to be presented to the System Controller.
See: MediaReceiver::Settings::mDecodedFormat.
Return: A function to where the Rendering Engine should send the frames. In case the requested inputSlot is already used by another custom input source, or a stream from an ingest, the returned function will be nullptr.
Note: Make sure no CUDA stream will write to the DeviceMemory in the AlignedFrame passed to the function. Failing to do so will lead to undefined behavior. In case another CUDA stream has written to the DeviceMemory, make sure to synchronize with the stream before passing the AlignedFrame.
Precondition: The AlignedFrame sent to this function must have the same pixel format as this MediaReceiver is configured to deliver to the Rendering Engine,
function removeCustomMultiViewSourceInput
bool removeCustomMultiViewSourceInput(
uint32_t inputSlot
)
Remove a custom multi-view generator source input earlier registered using the getCustomMultiViewSourceInput method.
Parameters:
- inputSlot The input slot the custom multi-view source input is connected to, that should be removed
Return: True if the custom multi-view source input was successfully removed, false in case there was no custom input registered for the given input slot, or in case of an internal error.
function setTallyBorder
void setTallyBorder(
uint32_t inputSlot,
TallyBorderColor color
)
Set tally border color in the multi-views for a specific input slot.
Parameters:
- inputSlot the input slot for a source
- color the color to set
function clearTallyBorder
void clearTallyBorder(
uint32_t inputSlot
)
Remove tally border in the multi-views for a specific input slot.
Parameters:
- inputSlot the input slot for a source
function clearAllTallyBorders
void clearAllTallyBorders()
Remove all tally borders.
function getTallyBorder
MediaReceiver::TallyBorderColor getTallyBorder(
uint32_t inputSlot
) const
get tally border color for an input slot
Parameters:
- inputSlot the input slot to get color for
Return: the tally border color for the given input slot
function MediaReceiver
MediaReceiver(
MediaReceiver const &
) =delete
MediaReceiver is neither copyable nor movable.
function MediaReceiver
MediaReceiver(
MediaReceiver &&
) =delete
function operator=
MediaReceiver & operator=(
MediaReceiver const &
) =delete
function operator=
MediaReceiver & operator=(
MediaReceiver &&
) =delete
function getVersion
static std::string getVersion()
Get application version.
Return: a string with the current version, e.g. “1.0.0”
function getBuildInfo
static std::string getBuildInfo()
Get application build information.
Return: a string with the current build information such as git hashes of all direct dependencies
function getLibraryVersions
static std::string getLibraryVersions()
Get versions of the libraries available at runtime, among others, CUDA runtime and driver versions.
Return: a string with the currently found versions of the libraries used by this application
Updated on 2023-10-03 at 14:32:11 +0200
3.1.22 - MediaReceiver::NewStreamParameters
MediaReceiver::NewStreamParameters
A struct containing information on the format of an incoming stream.
#include <MediaReceiver.h>
Public Attributes
| Name | |
|---|---|
| uint32_t | mVideoHeight |
| uint32_t | mVideoWidth |
| uint32_t | mFrameRateN |
| uint32_t | mFrameRateD |
| uint32_t | mAudioSampleRate |
Public Attributes Documentation
variable mVideoHeight
uint32_t mVideoHeight = 0;
variable mVideoWidth
uint32_t mVideoWidth = 0;
variable mFrameRateN
uint32_t mFrameRateN = 0;
variable mFrameRateD
uint32_t mFrameRateD = 1;
variable mAudioSampleRate
uint32_t mAudioSampleRate = 0;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.23 - MediaReceiver::Settings
MediaReceiver::Settings
Settings for a MediaReceiver.
#include <MediaReceiver.h>
Public Attributes
| Name | |
|---|---|
| AlignedFrame::PixelFormat | mDecodedFormat The pixel format delivered to the rendering engine. |
| std::function< std::function< void(const AlignedFramePtr &)>uint32_t inputSlot, const std::string &streamID, const NewStreamParameters &newStreamParameters)> | mNewConnectionCallback |
| std::function< void(uint32_t inputSlot)> | mClosedConnectionCallback |
| bool | mUseMultiViewer |
| bool | mDeliverOld Set to true if this MediaReceiver should have a multi-view generator. |
| CUstream | mAlignedFrameFreeStream |
Public Attributes Documentation
variable mDecodedFormat
AlignedFrame::PixelFormat mDecodedFormat = AlignedFrame::PixelFormat::kRgba64Le;
The pixel format delivered to the rendering engine.
variable mNewConnectionCallback
std::function< std::function< void(const AlignedFramePtr &)>uint32_t inputSlot, const std::string &streamID, const NewStreamParameters &newStreamParameters)> mNewConnectionCallback;
Parameters:
- inputSlot can be seen as a virtual SDI input on a hardware mixer and should be used by the Rendering engine to identify sources. For example, if a source is connected to input slot 5, the button “Cut to camera 5” on the control panel ought to cut to this stream. The MediaReceiver is responsible for making sure only one stream can be connected to an input slot at a time. This callback might be called multiple times with the same input slot, however, in case the stream has been disconnected and the mClosedConnectionCallback has been called for that input slot earlier.
- streamID is the identification string of the video/audio source on the Ingest. A Rendering engine might have the same StreamID connected multiple times (for instance if two different alignments are used for the same source) so this should not be used as an unique identifier for the stream.
- newStreamParameters contains information on the pending incoming stream to allow the Rendering engine to decide if it can receive it or not.
Note: The internal CUDA stream is synchronized before delivering the AlignedFrames, meaning the DeviceMemory in the AlignedFrame will always contain the written data; no further synchronization is needed before the rendering engine can read the data.
A callback called by the MediaReceiver whenever a new connection from an Ingest is set up. The callback should return a function to which the data will be delivered. In case the Rendering engine does not want to accept the pending incoming stream (due to a format not supported, etc) the Rendering engine can return nullptr.
variable mClosedConnectionCallback
std::function< void(uint32_t inputSlot)> mClosedConnectionCallback;
Parameters:
- inputSlot The input slot that was disconnected
A callback called whenever a connection from an Ingest has been stopped. When receiving this callback, the callback function returned by the mNewConnectionCallback will not be called anymore and can be discarded if required by the application. After this function has been called, the input slot might be reused by another incoming stream after a call to the mNewConnectionCallback.
variable mUseMultiViewer
bool mUseMultiViewer = false;
variable mDeliverOld
bool mDeliverOld = false;
Set to true if this MediaReceiver should have a multi-view generator.
variable mAlignedFrameFreeStream
CUstream mAlignedFrameFreeStream = nullptr;
Set to true if the media frames should be delivered, even if the delivery time has already passed, otherwise they are discarded The CUDA stream to use for asynchronously freeing the AlignedFrames’ DeviceMemory. Set this to the rendering engine’s CUDA stream, to ensure memory is not freed before the rendering engine is done using it asynchronously in its CUDA stream. Note that the MediaReceiver instance and all AlignedFrames delivered from it must be destroyed before the CUDA stream can be destroyed.
Updated on 2023-10-03 at 14:32:11 +0200
3.1.24 - MediaStreamer
MediaStreamer
MediaStreamer is a class that can take a single stream of uncompressed video and/or audio frames and encode and output it in some way to some interface. This interface can either be a stream to a network or writing down the data to a file on the hard drive. This class is configured from two interfaces. The input configuration (input video resolution, frame rate, pixel format, number of audio channels…) is made through this C++ API. The output stream is then started from the System Controller. Any of these configurations can be made first. The actual stream to output will start once the first call to. More…
#include <MediaStreamer.h>
Public Classes
| Name | |
|---|---|
| struct | Configuration The input configuration of the frames that will be sent to this MediaStreamer. The output stream configuration is made from the System controller via the ISystemControllerInterface. |
Public Functions
| Name | |
|---|---|
| MediaStreamer() Default constructor. | |
| ~MediaStreamer() Destructor. This will stop the output stream if not already done by calling. | |
| bool | configure(const std::shared_ptr< ISystemControllerInterface > & controllerInterface, CUcontext cudaContext) Configure this MediaStreamer and connect it to the System controller. This must be called before any call to the. |
| bool | setInputFormatAndStart(const Configuration & configuration) Set the input format of this MediaStreamer and start the streamer. The. |
| bool | stopAndResetFormat() Stop streaming and reset the format. A call to this method will stop any output streams set up by the ISystemControllerInterface and reset the input format set by the. |
| bool | hasFormatAndIsRunning() const |
| bool | hasOpenOutputStream() const |
| bool | outputData(const AlignedFramePtr & frame) Output data through this streamer. The AlignedFrame::mRenderingTimestamp of the frame will be used as PTS when encoding the uncompressed frame. |
| std::string | getVersion() Get application version. |
| std::string | getBuildInfo() Get application build information. |
Detailed Description
class MediaStreamer;
MediaStreamer is a class that can take a single stream of uncompressed video and/or audio frames and encode and output it in some way to some interface. This interface can either be a stream to a network or writing down the data to a file on the hard drive. This class is configured from two interfaces. The input configuration (input video resolution, frame rate, pixel format, number of audio channels…) is made through this C++ API. The output stream is then started from the System Controller. Any of these configurations can be made first. The actual stream to output will start once the first call to.
See: outputData is made.
Public Functions Documentation
function MediaStreamer
MediaStreamer()
Default constructor.
function ~MediaStreamer
~MediaStreamer()
Destructor. This will stop the output stream if not already done by calling.
See: stop.
function configure
bool configure(
const std::shared_ptr< ISystemControllerInterface > & controllerInterface,
CUcontext cudaContext
)
Configure this MediaStreamer and connect it to the System controller. This must be called before any call to the.
Parameters:
- controllerInterface The interface to the System controller, used for communicating with this MediaStreamer
- cudaContext The CUDA context to use for this MediaStreamer. The frames passed to this instance should be valid in this CUDA context. The streamer will use this context for preprocessing and encoding.
See:
Return: True if the streamer was successfully connected to the System controller
function setInputFormatAndStart
bool setInputFormatAndStart(
const Configuration & configuration
)
Set the input format of this MediaStreamer and start the streamer. The.
Parameters:
- configuration The configuration with the format of the frames that will be sent to this MediaReceiver
See:
- configure method must be called before this method is called. This method must be called before any call to
- outputData. If the format should be reset, the
- stopAndResetFormat method should be called first and then this method can be called again to reset the format.
Return: True if the streamer was successfully started, false otherwise
function stopAndResetFormat
bool stopAndResetFormat()
Stop streaming and reset the format. A call to this method will stop any output streams set up by the ISystemControllerInterface and reset the input format set by the.
See: setInputFormatAndStart method. The connection to the ISystemControllerInterface will be kept.
Return: True if the stream was successfully stopped and the format reset, or if the format was not set before this method was called, false on error.
function hasFormatAndIsRunning
bool hasFormatAndIsRunning() const
Return: True if the input format is set and the OutputStreamer is running, false otherwise
function hasOpenOutputStream
bool hasOpenOutputStream() const
See:
- outputData will be discarded without being encoded, as there is no stream to output them to. This method can be used to check if the frame even needs to be produced by the rendering engine. Note however, that the
- outputData method will still log the frames sent to it as received, even if they are not encoded when the output stream is closed.
Return: True if the output stream of the MediaStreamer is currently open and outputting the data, false otherwise. In case this returns false all frames passed to
function outputData
bool outputData(
const AlignedFramePtr & frame
)
Output data through this streamer. The AlignedFrame::mRenderingTimestamp of the frame will be used as PTS when encoding the uncompressed frame.
Parameters:
- frame The data frame to output, with video data in CUDA memory
See: setInputFormatAndStart method, or if the format has not been set by a call to that method.
Return: True if the frame was accepted (but not necessarily streamed, in case the output stream has not been set up by the ISystemControllerInterface), false in case the frame did not match the configuration made in the
Note: The DeviceMemory in the AlignedFrame passed to this method must not be in use by any CUDA stream. In case the memory has been used in kernels in another CUDA stream, make sure to first synchronize with the stream, before passing it over to the MediaStreamer.
function getVersion
static std::string getVersion()
Get application version.
Return: a string with the current version, e.g. “1.0.0”
function getBuildInfo
static std::string getBuildInfo()
Get application build information.
Return: a string with the current build information such as git hashes of all direct dependencies
Updated on 2023-10-03 at 14:32:11 +0200
3.1.25 - MediaStreamer::Configuration
MediaStreamer::Configuration
The input configuration of the frames that will be sent to this MediaStreamer. The output stream configuration is made from the System controller via the ISystemControllerInterface.
#include <MediaStreamer.h>
Public Attributes
| Name | |
|---|---|
| AlignedFrame::PixelFormat | mIncomingPixelFormat |
| uint32_t | mWidth |
| uint32_t | mHeight |
| uint32_t | mFrameRateN |
| uint32_t | mFrameRateD |
| uint32_t | mAudioSampleRate |
| uint32_t | mNumAudioChannels |
Public Attributes Documentation
variable mIncomingPixelFormat
AlignedFrame::PixelFormat mIncomingPixelFormat = AlignedFrame::PixelFormat::kUnknown;
variable mWidth
uint32_t mWidth = 0;
variable mHeight
uint32_t mHeight = 0;
variable mFrameRateN
uint32_t mFrameRateN = 0;
variable mFrameRateD
uint32_t mFrameRateD = 0;
variable mAudioSampleRate
uint32_t mAudioSampleRate = 0;
variable mNumAudioChannels
uint32_t mNumAudioChannels = 0;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.26 - PipelineSystemControllerInterfaceFactory
PipelineSystemControllerInterfaceFactory
Public Functions
| Name | |
|---|---|
| PipelineSystemControllerInterfaceFactory(const std::string & systemControllerIP, uint16_t systemControllerPort, const std::string & systemControllerPostfix, const std::string & psk, const std::string & myIP, bool useHTTPS, bool allowInsecureHTTPS, const std::string & customCaCertFile) Constructor. | |
| PipelineSystemControllerInterfaceFactory(PipelineSystemControllerInterfaceFactory const & ) =delete | |
| PipelineSystemControllerInterfaceFactory(PipelineSystemControllerInterfaceFactory const && ) =delete | |
| PipelineSystemControllerInterfaceFactory & | operator=(PipelineSystemControllerInterfaceFactory const & ) =delete |
| PipelineSystemControllerInterfaceFactory & | operator=(PipelineSystemControllerInterfaceFactory const && ) =delete |
| std::shared_ptr< SystemControllerConnection > | getMediaReceiverInterface(const std::string & name) Get the interface to the MediaReceiver. Multiple calls to this method will return the same interface. Internally the UUID is randomly generated and the correct type is set. |
| std::shared_ptr< SystemControllerConnection > | createMediaStreamerInterface(const std::string & name) Create a new SystemControllerInterface to a MediaStreamer. Multiple calls to this method will return new interfaces each time. Internally the UUID is randomly generated, the correct type is set and the MediaReceiver is set as parent. The. |
| std::shared_ptr< SystemControllerConnection > | createControlReceiverInterface(const std::string & name) Create a new SystemControllerInterface to a ControlReceiver. Multiple calls to this method will return new interfaces each time. Internally the UUID is randomly generated, the correct type is set and the MediaReceiver is set as parent. The. |
Public Functions Documentation
function PipelineSystemControllerInterfaceFactory
PipelineSystemControllerInterfaceFactory(
const std::string & systemControllerIP,
uint16_t systemControllerPort,
const std::string & systemControllerPostfix,
const std::string & psk,
const std::string & myIP,
bool useHTTPS,
bool allowInsecureHTTPS,
const std::string & customCaCertFile
)
Constructor.
Parameters:
- systemControllerIP The IP address of the System controller to connect to.
- systemControllerPort The network port of the System controller to connect to.
- systemControllerPostfix The postfix of the System controller’s address, to chose which API endpoints to use.
- psk The Pre-shared key used for authorization at the System controller.
- myIP The public IP address of the pipeline, i.e. the external IP used to connect to the pipeline.
- useHTTPS If HTTPS should be used instead of HTTP
- allowInsecureHTTPS Set to true to allow self-signed HTTPS certificates. Should normally be false.
- customCaCertFile Full path to CA certificate file for verifying server cert, optional.
function PipelineSystemControllerInterfaceFactory
PipelineSystemControllerInterfaceFactory(
PipelineSystemControllerInterfaceFactory const &
) =delete
function PipelineSystemControllerInterfaceFactory
PipelineSystemControllerInterfaceFactory(
PipelineSystemControllerInterfaceFactory const &&
) =delete
function operator=
PipelineSystemControllerInterfaceFactory & operator=(
PipelineSystemControllerInterfaceFactory const &
) =delete
function operator=
PipelineSystemControllerInterfaceFactory & operator=(
PipelineSystemControllerInterfaceFactory const &&
) =delete
function getMediaReceiverInterface
std::shared_ptr< SystemControllerConnection > getMediaReceiverInterface(
const std::string & name
)
Get the interface to the MediaReceiver. Multiple calls to this method will return the same interface. Internally the UUID is randomly generated and the correct type is set.
Parameters:
- name The human readable name of the MediaReceiver to provide to the System controller
Return: A configured connection on success, otherwise nullptr
function createMediaStreamerInterface
std::shared_ptr< SystemControllerConnection > createMediaStreamerInterface(
const std::string & name
)
Create a new SystemControllerInterface to a MediaStreamer. Multiple calls to this method will return new interfaces each time. Internally the UUID is randomly generated, the correct type is set and the MediaReceiver is set as parent. The.
Parameters:
- name The human readable name of the MediaStreamer to provide to the System controller
See: getMediaReceiverInterface must be called before this method is called
Return: A configured connection on success, otherwise nullptr
function createControlReceiverInterface
std::shared_ptr< SystemControllerConnection > createControlReceiverInterface(
const std::string & name
)
Create a new SystemControllerInterface to a ControlReceiver. Multiple calls to this method will return new interfaces each time. Internally the UUID is randomly generated, the correct type is set and the MediaReceiver is set as parent. The.
Parameters:
- name The human readable name of the ControlReceiver to provide to the System controller
See: getMediaReceiverInterface must be called before this method is called to generate the parent interface.
Return: A configured connection on success, otherwise nullptr
Updated on 2023-10-03 at 14:32:11 +0200
3.1.27 - SystemControllerConnection
SystemControllerConnection
An implementation of the ISystemControllerInterface for a System controller residing in a remote server. The connection to the server uses a Websocket.
#include <SystemControllerConnection.h>
Inherits from ISystemControllerInterface
Public Classes
| Name | |
|---|---|
| struct | Settings Settings for a SystemControllerConnection. |
Public Types
| Name | |
|---|---|
| enum class uint32_t | ComponentType { kIngest, kMediaReceiver, kMediaStreamer, kControlDataReceiver, kControlDataSender} Enumeration of component types the component using this SystemControllerConnection can tell the System Controller to be seen as. |
Public Functions
| Name | |
|---|---|
| SystemControllerConnection() | |
| ~SystemControllerConnection() override | |
| bool | configure(const Settings & settings, const std::shared_ptr< ISystemControllerInterface > & parentInterface =nullptr) Configure this connection. This method should be called before calling. |
| virtual bool | connect() override Connect to the server using the settings set with the. |
| virtual bool | isConnected() const override |
| virtual std::string | getUUID() const override |
| virtual Response | sendRequest(const std::string & request, const nlohmann::json & parameters) override Send a JSON object to the system controller server and awaits the response. |
| virtual bool | disconnect() override Disconnect from the server. |
| virtual bool | registerRequestCallback(const Callbacks & callbacks) override Register callbacks to call when getting requests from the server or the server connection is lost. |
| virtual bool | hasParent() const override |
| virtual std::shared_ptr< ISystemControllerInterface > | getParentInterface() const override |
| SystemControllerConnection(SystemControllerConnection const & ) =delete | |
| SystemControllerConnection(SystemControllerConnection && ) =delete | |
| SystemControllerConnection & | operator=(SystemControllerConnection const & ) =delete |
| SystemControllerConnection & | operator=(SystemControllerConnection && ) =delete |
Additional inherited members
Public Classes inherited from ISystemControllerInterface
| Name | |
|---|---|
| struct | Callbacks A struct containing the callbacks that needs to be registered by the component using this interface. |
| struct | Response A response to a request, consists of a status code and an (optional) parameters JSON object. |
Public Types inherited from ISystemControllerInterface
| Name | |
|---|---|
| enum class uint32_t | StatusCode { SUCCESS, TOO_MANY_REQUESTS, UUID_ALREADY_REGISTERED, FORMAT_ERROR, ALREADY_CONFIGURED, OUT_OF_RESOURCES, NOT_FOUND, INTERNAL_ERROR, CONNECTION_FAILED, TIMEOUT_EXCEEDED, KEY_MISMATCH, UNKNOWN_REQUEST, MALFORMED_REQUEST, ALREADY_IN_USE} Status codes used in JSON response messages for Websockets. These are starting at 3000 since the 1000 - 2000 range is taken up by the Spec: https://datatracker.ietf.org/doc/html/rfc6455#section-7.4.1. |
Public Functions inherited from ISystemControllerInterface
| Name | |
|---|---|
| virtual | ~ISystemControllerInterface() =default Virtual destructor. |
Public Types Documentation
enum ComponentType
| Enumerator | Value | Description |
|---|---|---|
| kIngest | ||
| kMediaReceiver | ||
| kMediaStreamer | ||
| kControlDataReceiver | ||
| kControlDataSender |
Enumeration of component types the component using this SystemControllerConnection can tell the System Controller to be seen as.
Public Functions Documentation
function SystemControllerConnection
SystemControllerConnection()
function ~SystemControllerConnection
~SystemControllerConnection() override
function configure
bool configure(
const Settings & settings,
const std::shared_ptr< ISystemControllerInterface > & parentInterface =nullptr
)
Configure this connection. This method should be called before calling.
Parameters:
- settings The settings to use when connecting to the server
- parentInterface Optional parent interface that this interface is a child of. Setting this to nullptr means that this interface does not have a parent interface
See: connect.
Return: True if successfully configured, false otherwise
function connect
virtual bool connect() override
Connect to the server using the settings set with the.
See: configure method.
Return: True if connection was successful, false otherwise
Reimplements: ISystemControllerInterface::connect
function isConnected
virtual bool isConnected() const override
Return: True if this class is connected to the server, false otherwise
Reimplements: ISystemControllerInterface::isConnected
function getUUID
virtual std::string getUUID() const override
Return: The UUID of this interface to the System controller
Reimplements: ISystemControllerInterface::getUUID
function sendRequest
virtual Response sendRequest(
const std::string & request,
const nlohmann::json & parameters
) override
Send a JSON object to the system controller server and awaits the response.
Parameters:
- request The name of the request command
- parameters The parameters part of the JSON message
Return: The response from the controller
Note: The status code might be TIMEOUT in case no response was received within the timeframe
Reimplements: ISystemControllerInterface::sendRequest
function disconnect
virtual bool disconnect() override
Disconnect from the server.
Return: True if successfully disconnected, false on internal error
Reimplements: ISystemControllerInterface::disconnect
function registerRequestCallback
virtual bool registerRequestCallback(
const Callbacks & callbacks
) override
Register callbacks to call when getting requests from the server or the server connection is lost.
Parameters:
- callbacks The callbacks to set
Return: True if successfully registered, false if a callback is not set, or if already connected to the server
Reimplements: ISystemControllerInterface::registerRequestCallback
function hasParent
virtual bool hasParent() const override
Return: True if this component has a parent ISystemControllerInterface, false otherwise
Reimplements: ISystemControllerInterface::hasParent
function getParentInterface
virtual std::shared_ptr< ISystemControllerInterface > getParentInterface() const override
Return: A pointer to parent’s ISystemControllerInterface, if any. Returns nullptr in case there is no parent
Reimplements: ISystemControllerInterface::getParentInterface
function SystemControllerConnection
SystemControllerConnection(
SystemControllerConnection const &
) =delete
function SystemControllerConnection
SystemControllerConnection(
SystemControllerConnection &&
) =delete
function operator=
SystemControllerConnection & operator=(
SystemControllerConnection const &
) =delete
function operator=
SystemControllerConnection & operator=(
SystemControllerConnection &&
) =delete
Updated on 2023-10-03 at 14:32:11 +0200
3.1.28 - SystemControllerConnection::Settings
SystemControllerConnection::Settings
Settings for a SystemControllerConnection.
#include <SystemControllerConnection.h>
Public Attributes
| Name | |
|---|---|
| std::string | mSystemControllerIP |
| uint16_t | mSystemControllerPort |
| std::string | mSystemControllerPostfix |
| std::string | mPSK |
| std::string | mUUID |
| ComponentType | mType |
| std::string | mName |
| std::string | mMyIP |
| std::chrono::milliseconds | mConnectTimeout |
| bool | mEnableHTTPS |
| bool | mInsecureHTTPS |
| std::string | mCustomCaCertFile |
Public Attributes Documentation
variable mSystemControllerIP
std::string mSystemControllerIP;
variable mSystemControllerPort
uint16_t mSystemControllerPort;
variable mSystemControllerPostfix
std::string mSystemControllerPostfix;
variable mPSK
std::string mPSK;
variable mUUID
std::string mUUID;
variable mType
ComponentType mType;
variable mName
std::string mName;
variable mMyIP
std::string mMyIP;
variable mConnectTimeout
std::chrono::milliseconds mConnectTimeout {
3000};
variable mEnableHTTPS
bool mEnableHTTPS;
variable mInsecureHTTPS
bool mInsecureHTTPS;
variable mCustomCaCertFile
std::string mCustomCaCertFile;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.29 - TimeCommon::TAIStatus
TimeCommon::TAIStatus
Public Attributes
| Name | |
|---|---|
| StratumLevel | mStratum |
| bool | mHasLock |
| double | mTimeDiffS |
Public Attributes Documentation
variable mStratum
StratumLevel mStratum = StratumLevel::UnknownStratum;
variable mHasLock
bool mHasLock = false;
variable mTimeDiffS
double mTimeDiffS = 0.0;
Updated on 2023-10-03 at 14:32:11 +0200
3.1.30 - TimeCommon::TimeStructure
TimeCommon::TimeStructure
Public Attributes
| Name | |
|---|---|
| uint64_t | t1 |
| uint64_t | t2 |
| uint64_t | t3 |
| uint64_t | t4 |
| uint64_t | token |
| uint64_t | dummy1 |
| uint64_t | dummy2 |
| uint64_t | dummy3 |
Public Attributes Documentation
variable t1
uint64_t t1 = 0;
variable t2
uint64_t t2 = 0;
variable t3
uint64_t t3 = 0;
variable t4
uint64_t t4 = 0;
variable token
uint64_t token = 0;
variable dummy1
uint64_t dummy1 = 0;
variable dummy2
uint64_t dummy2 = 0;
variable dummy3
uint64_t dummy3 = 0;
Updated on 2023-10-03 at 14:32:11 +0200
3.2 - Files
Files
- dir build
- dir install
- dir include
- file include/AclLog.h
- file include/AlignedFrame.h
- file include/Base64.h
- file include/ControlDataCommon.h
- file include/ControlDataReceiver.h
- file include/ControlDataSender.h
- file include/DeviceMemory.h
- file include/ISystemControllerInterface.h
- file include/IngestApplication.h
- file include/IngestUtils.h
- file include/MediaReceiver.h
- file include/MediaStreamer.h
- file include/PipelineSystemControllerInterfaceFactory.h
- file include/SystemControllerConnection.h
- file include/TimeCommon.h
- file include/UUIDUtils.h
- dir include
- dir install
Updated on 2023-10-03 at 14:32:11 +0200
3.2.1 - include/AclLog.h
include/AclLog.h
Namespaces
| Name |
|---|
| AclLog A namespace for logging utilities. |
Classes
| Name | |
|---|---|
| class | AclLog::CommandLogFormatter This class is used to format log entries for Rendering Engine commands. |
| class | AclLog::ThreadNameFormatterFlag |
| class | AclLog::FileLocationFormatterFlag A custom flag formatter which logs the source file location between a par of “[]”, in case the location is provided with the log call. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <filesystem>
#include <string>
#include <spdlog/details/log_msg.h>
#include <spdlog/fmt/fmt.h>
#include <spdlog/formatter.h>
#include <spdlog/pattern_formatter.h>
#include <sys/prctl.h>
namespace AclLog {
enum class Level {
kTrace, // Detailed diagnostics (for development only)
kDebug, // Messages intended for debugging only
kInfo, // Messages about normal behavior (default log level)
kWarning, // Warnings (functionality intact)
kError, // Recoverable errors (functionality impaired)
kCritical, // Unrecoverable errors (application must stop)
kOff // Turns off all logging
};
void init(const std::string& name);
void initCommandLog(const std::string& name);
void setLevel(Level level);
void logCommand(const std::string& command);
AclLog::Level getLogLevel();
size_t getMaxFileSize();
size_t getMaxLogRotations();
std::filesystem::path getLogFileFullPath(const std::string& name);
class CommandLogFormatter : public spdlog::formatter {
public:
CommandLogFormatter();
void format(const spdlog::details::log_msg& msg, spdlog::memory_buf_t& dest) override;
[[nodiscard]] std::unique_ptr<spdlog::formatter> clone() const override;
private:
std::unique_ptr<spdlog::pattern_formatter> mCommandLogPattern;
};
inline std::string getThreadName() {
static const size_t RECOMMENDED_BUFFER_SIZE = 20;
static thread_local std::string name;
if (name.empty()) {
char buffer[RECOMMENDED_BUFFER_SIZE];
int retval = prctl(PR_GET_NAME, buffer);
if (retval == -1) {
throw spdlog::spdlog_ex("Failed to get thread name: ", errno);
}
name = std::string(buffer);
}
return name;
}
class ThreadNameFormatterFlag : public spdlog::custom_flag_formatter {
public:
void format(const spdlog::details::log_msg&, const std::tm&, spdlog::memory_buf_t& dest) override {
std::string threadName = getThreadName();
dest.append(threadName.data(), threadName.data() + threadName.size());
}
[[nodiscard]] std::unique_ptr<custom_flag_formatter> clone() const override {
return spdlog::details::make_unique<ThreadNameFormatterFlag>();
}
};
class FileLocationFormatterFlag : public spdlog::custom_flag_formatter {
public:
void format(const spdlog::details::log_msg& msg, const std::tm&, spdlog::memory_buf_t& dest) override {
if (!msg.source.empty()) {
using namespace spdlog::details;
dest.push_back('[');
const char* filename = short_filename_formatter<null_scoped_padder>::basename(msg.source.filename);
fmt_helper::append_string_view(filename, dest);
dest.push_back(':');
fmt_helper::append_int(msg.source.line, dest);
dest.push_back(']');
}
}
[[nodiscard]] std::unique_ptr<custom_flag_formatter> clone() const override {
return spdlog::details::make_unique<FileLocationFormatterFlag>();
}
};
} // namespace AclLog
Updated on 2023-10-03 at 14:32:11 +0200
3.2.2 - include/AlignedFrame.h
include/AlignedFrame.h
Classes
| Name | |
|---|---|
| struct | AlignedAudioFrame AlignedAudioFrame is a frame of interleaved floating point audio samples with a given number of channels. |
| struct | AlignedFrame A frame of aligned data that is passed to the rendering engine from the MediaReceiver. A DataFrame contains a time stamped frame of media, which might be video, audio and auxiliary data such as subtitles. A single DataFrame can contain one or multiple types of media. Which media types are included can be probed by nullptr-checking/size checking the data members. The struct has ownership of all data pointers included. The struct includes all logic for freeing the resources held by this struct and the user should therefore just make sure the struct itself is deallocated to ensure all resources are freed. |
Types
| Name | |
|---|---|
| using std::shared_ptr< AlignedAudioFrame > | AlignedAudioFramePtr |
| using std::shared_ptr< const AlignedAudioFrame > | AlignedAudioFrameConstPtr |
| using std::shared_ptr< AlignedFrame > | AlignedFramePtr |
Functions
| Name | |
|---|---|
| AlignedAudioFramePtr | createAlignedAudioFrame(uint8_t numberOfChannels, uint32_t numberOfSamplesPerChannel) Create a new AudioFrame with a given amount of samples allocated and all samples initialized to 0.0f. |
| AlignedAudioFramePtr | extractChannel(AlignedAudioFrameConstPtr sourceFrame, uint8_t channelIndex) Extract one channel from an AlignedAudioFrame as a new AlignedAudioFrame. The new AlignedAudioFrame will share no data with the original frame, meaning the new frame can be edited without corrupting the old one. |
Types Documentation
using AlignedAudioFramePtr
using AlignedAudioFramePtr = std::shared_ptr<AlignedAudioFrame>;
using AlignedAudioFrameConstPtr
using AlignedAudioFrameConstPtr = std::shared_ptr<const AlignedAudioFrame>;
using AlignedFramePtr
using AlignedFramePtr = std::shared_ptr<AlignedFrame>;
Functions Documentation
function createAlignedAudioFrame
AlignedAudioFramePtr createAlignedAudioFrame(
uint8_t numberOfChannels,
uint32_t numberOfSamplesPerChannel
)
Create a new AudioFrame with a given amount of samples allocated and all samples initialized to 0.0f.
Parameters:
- numberOfChannels Number of channels to allocate space for
- numberOfSamplesPerChannel Number of samples per channel to allocate space for
Return: Shared pointer to the new AudioFrame
function extractChannel
AlignedAudioFramePtr extractChannel(
AlignedAudioFrameConstPtr sourceFrame,
uint8_t channelIndex
)
Extract one channel from an AlignedAudioFrame as a new AlignedAudioFrame. The new AlignedAudioFrame will share no data with the original frame, meaning the new frame can be edited without corrupting the old one.
Parameters:
- sourceFrame The frame to extract a channel from
- channelIndex The zero-based channel index to extract
Return: Shared pointer to a new mono AlignedAudioFrame, or nullptr if channel is out of bounds
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <array>
#include <iostream>
#include <memory>
#include <vector>
#include <cuda_runtime_api.h>
#include "DeviceMemory.h"
struct AlignedAudioFrame {
// The samples interleaved
std::vector<float> mSamples;
uint8_t mNumberOfChannels = 0;
uint32_t mNumberOfSamplesPerChannel = 0;
};
using AlignedAudioFramePtr = std::shared_ptr<AlignedAudioFrame>;
using AlignedAudioFrameConstPtr = std::shared_ptr<const AlignedAudioFrame>;
AlignedAudioFramePtr createAlignedAudioFrame(uint8_t numberOfChannels, uint32_t numberOfSamplesPerChannel);
AlignedAudioFramePtr extractChannel(AlignedAudioFrameConstPtr sourceFrame, uint8_t channelIndex);
struct AlignedFrame {
enum class PixelFormat {
kUnknown,
kNv12, // 8 bit per component 4:2:0 YUV format. Y plane followed by interleaved UV plane.
kP016, // 16 bit per component 4:2:0 YUV format. Y plane followed by interleaved UV plane.
kUyvy, // 8 bit per component 4:2:2 YUV format. U-Y-V-Y bytes interleaved.
kRgba, // 8 bit per component RGBA, ordered as R-G-B-A-R-G.. in memory.
kRgba64Le // 16 bit per component RGBA, ordered as R-G-B-A-R-G.. in memory with little endian words.
};
AlignedFrame() = default;
~AlignedFrame() = default;
AlignedFrame(AlignedFrame const&) = delete; // Copy construct
AlignedFrame& operator=(AlignedFrame const&) = delete; // Copy assign
int64_t mCaptureTimestamp = 0;
int64_t mRenderingTimestamp = 0;
// Video
std::shared_ptr<DeviceMemory> mVideoFrame = nullptr;
PixelFormat mPixelFormat = PixelFormat::kUnknown;
uint32_t mFrameRateN = 0;
uint32_t mFrameRateD = 0;
uint32_t mWidth = 0;
uint32_t mHeight = 0;
// Audio
AlignedAudioFramePtr mAudioFrame = nullptr;
uint32_t mAudioSamplingFrequency = 0;
};
using AlignedFramePtr = std::shared_ptr<AlignedFrame>;
Updated on 2023-10-03 at 14:32:11 +0200
3.2.3 - include/Base64.h
include/Base64.h
Functions
| Name | |
|---|---|
| std::string | encodeBase64(const uint8_t * data, size_t size) Base64 encode some data. |
| std::string | encodeBase64(const std::vector< uint8_t > & data) Base64 encode some data. |
| std::vector< uint8_t > | decodeBase64(const std::string & data) Decode some Base64 encoded data. |
Functions Documentation
function encodeBase64
std::string encodeBase64(
const uint8_t * data,
size_t size
)
Base64 encode some data.
Parameters:
- data Pointer to the data to encode with Base64
- size The length of the data to encode with Base64
Return: The resulting Base64 encoded string
function encodeBase64
std::string encodeBase64(
const std::vector< uint8_t > & data
)
Base64 encode some data.
Parameters:
- data The data to encode with Base64
Return: The resulting Base64 encoded string
function decodeBase64
std::vector< uint8_t > decodeBase64(
const std::string & data
)
Decode some Base64 encoded data.
Parameters:
- data The Base64 encoded string to decode
Return: The resulting decoded data
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <string>
#include <vector>
std::string encodeBase64(const uint8_t* data, size_t size);
std::string encodeBase64(const std::vector<uint8_t>& data);
std::vector<uint8_t> decodeBase64(const std::string& data);
Updated on 2023-10-03 at 14:32:11 +0200
3.2.4 - include/ControlDataCommon.h
include/ControlDataCommon.h
Namespaces
| Name |
|---|
| ControlDataCommon |
Classes
| Name | |
|---|---|
| struct | ControlDataCommon::ConnectionStatus Connection status struct containing information about a connection event. |
| struct | ControlDataCommon::Response A response from a ControlDataReceiver to a request. The UUID tells which receiver the response is sent from. |
| struct | ControlDataCommon::StatusMessage A status message from a ControlDataReceiver. The UUID tells which receiver the message is sent from. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <cstdint>
#include <string>
#include <vector>
namespace ControlDataCommon {
enum class ConnectionType { CONNECTED, DISCONNECTED };
struct ConnectionStatus {
ConnectionStatus() = default;
ConnectionStatus(ConnectionType mConnectionType, const std::string& mIp, uint16_t mPort)
: mConnectionType(mConnectionType)
, mIP(mIp)
, mPort(mPort) {
}
ConnectionType mConnectionType = ConnectionType::DISCONNECTED;
std::string mIP;
uint16_t mPort = 0;
};
struct Response {
std::vector<uint8_t> mMessage;
uint64_t mRequestId = 0;
std::string mFromUUID;
};
struct StatusMessage {
std::vector<uint8_t> mMessage;
std::string mFromUUID;
};
} // namespace ControlDataCommon
Updated on 2023-10-03 at 14:32:11 +0200
3.2.5 - include/ControlDataReceiver.h
include/ControlDataReceiver.h
Classes
| Name | |
|---|---|
| class | ControlDataReceiver A ControlDataReceiver can receive messages from a sender or another ControlDataReceiver using a network connection. It can also connect to and forward the incoming request messages to other receivers. The connections to the sender and the other receivers are controlled by an ISystemControllerInterface instance. The ControlDataReceiver has a receiving or listening side, as well as a sending side. The listening side can listen to one single network port and have multiple ControlDataSenders and ControlDataReceivers connected to that port to receive requests from them. On the sending side of the ControlDataReceiver, it can be connected to the listening side of other ControlDataReceivers, used to forward all incoming messages to that receiver, as well as sending its own requests. |
| struct | ControlDataReceiver::IncomingRequest An incoming request to this ControlDataReceiver. |
| struct | ControlDataReceiver::ReceiverResponse A response message to a request. |
| struct | ControlDataReceiver::Settings Settings for a ControlDataReceiver. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <memory>
#include <ISystemControllerInterface.h>
#include "ControlDataCommon.h"
class ControlDataReceiver final {
public:
struct IncomingRequest {
std::vector<std::vector<uint8_t>> mMessages;
std::string mSenderUUID;
std::string mRequesterUUID;
uint64_t mRequestID = 0;
int64_t mSenderTimestampUs =
0;
int64_t mDeliveryTimestampUs =
0;
};
struct ReceiverResponse {
std::vector<uint8_t> mMessage;
};
struct Settings {
std::function<void(const IncomingRequest&)> mPreviewIncomingRequestCallback;
std::function<ReceiverResponse(const IncomingRequest&)> mIncomingRequestCallback;
std::function<void(const ControlDataCommon::ConnectionStatus&)>
mConnectionStatusCallback;
std::function<void(const ControlDataCommon::Response&)>
mResponseCallback;
};
ControlDataReceiver();
~ControlDataReceiver();
bool configure(const std::shared_ptr<ISystemControllerInterface>& controllerInterface, const Settings& settings);
bool sendStatusMessageToSender(const std::vector<uint8_t>& message);
bool sendRequestToReceivers(const std::vector<uint8_t>& request, uint64_t& requestId);
bool sendMultiRequestToReceivers(const std::vector<std::vector<uint8_t>>& request, uint64_t& requestId);
static std::string getVersion();
static std::string getBuildInfo();
// ControlDataReceiver is not copyable
ControlDataReceiver(ControlDataReceiver const&) = delete; // Copy construct
ControlDataReceiver& operator=(ControlDataReceiver const&) = delete; // Copy assign
private:
class Impl;
std::unique_ptr<Impl> pImpl;
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.6 - include/ControlDataSender.h
include/ControlDataSender.h
Classes
| Name | |
|---|---|
| class | ControlDataSender A ControlDataSender can send control signals to one or more receivers using a network connection. A single ControlDataSender can connect to multiple receivers, all identified by a UUID. The class is controlled using an ISystemControllerInterface; this interface is responsible for setting up connections to receivers. The ControlDataSender can send asynchronous requests to (all) the receivers and get a response back. Each response is identified with a request ID as well as the UUID of the responding receiver. The ControlDataSender can also receive status messages from the receivers. |
| struct | ControlDataSender::Settings Settings for a ControlDataSender. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <functional>
#include <memory>
#include <vector>
#include <ISystemControllerInterface.h>
#include "ControlDataCommon.h"
class ControlDataSender final {
public:
struct Settings {
std::function<void(const ControlDataCommon::ConnectionStatus&)>
mConnectionStatusCallback; // Callback for receiver connection/disconnection events
std::function<void(const ControlDataCommon::Response&)>
mResponseCallback; // Callback for response messages from receivers
std::function<void(const ControlDataCommon::StatusMessage&)>
mStatusMessageCallback; // Callback for status messages from receivers
};
ControlDataSender();
~ControlDataSender();
bool configure(const std::shared_ptr<ISystemControllerInterface>& controllerInterface, const Settings& settings);
bool sendRequestToReceivers(const std::vector<uint8_t>& request, uint64_t& requestId);
bool sendMultiRequestToReceivers(const std::vector<std::vector<uint8_t>>& request, uint64_t& requestId);
static std::string getVersion();
static std::string getGitRevision();
static std::string getBuildInfo();
// ControlDataSender is not copyable
ControlDataSender(ControlDataSender const&) = delete; // Copy construct
ControlDataSender& operator=(ControlDataSender const&) = delete; // Copy assign
private:
class Impl;
std::unique_ptr<Impl> pImpl;
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.7 - include/DeviceMemory.h
include/DeviceMemory.h
Classes
| Name | |
|---|---|
| class | DeviceMemory RAII class for a CUDA memory buffer. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <cstddef>
#include <cstdint>
#include <cuda_runtime.h>
class DeviceMemory {
public:
DeviceMemory() = default;
explicit DeviceMemory(size_t numberOfBytes);
explicit DeviceMemory(size_t numberOfBytes, cudaStream_t cudaStream);
explicit DeviceMemory(void* deviceMemory) noexcept;
bool allocateMemory(size_t numberOfBytes);
bool allocateMemoryAsync(size_t numberOfBytes, cudaStream_t cudaStream);
bool reallocateMemory(size_t numberOfBytes);
bool allocateAndResetMemory(size_t numberOfBytes);
bool allocateAndResetMemoryAsync(size_t numberOfBytes, cudaStream_t cudaStream);
bool freeMemory();
bool freeMemoryAsync(cudaStream_t cudaStream);
void setFreeingCudaStream(cudaStream_t cudaStream);
~DeviceMemory();
template <typename T = uint8_t> [[nodiscard]] T* getDevicePointer() const {
return reinterpret_cast<T*>(dMemory);
}
[[nodiscard]] size_t getSize() const;
DeviceMemory(DeviceMemory&& other) noexcept;
DeviceMemory& operator=(DeviceMemory&& other) noexcept;
void swap(DeviceMemory& other) noexcept;
DeviceMemory(DeviceMemory const&) = delete;
DeviceMemory operator=(DeviceMemory const&) = delete;
private:
uint8_t* dMemory = nullptr;
size_t mAllocatedBytes = 0;
cudaStream_t mCudaStream = nullptr; // Stream to use for Async free
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.8 - include/IngestApplication.h
include/IngestApplication.h
Classes
| Name | |
|---|---|
| class | IngestApplication |
| struct | IngestApplication::Settings |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <memory>
#include "ISystemControllerInterface.h"
class IngestApplication {
public:
struct Settings {};
IngestApplication();
~IngestApplication();
bool start(const std::shared_ptr<ISystemControllerInterface>& controllerInterface, const Settings& settings);
bool stop();
static std::string getVersion();
static std::string getGitRevision();
static std::string getBuildInfo();
static std::string getLibraryVersions();
private:
class Impl;
std::unique_ptr<Impl> pImpl;
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.9 - include/IngestUtils.h
include/IngestUtils.h
Namespaces
| Name |
|---|
| IngestUtils |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
namespace IngestUtils {
bool isRunningWithRootPrivileges();
} // namespace IngestUtils
Updated on 2023-10-03 at 14:32:11 +0200
3.2.10 - include/ISystemControllerInterface.h
include/ISystemControllerInterface.h
Classes
| Name | |
|---|---|
| class | ISystemControllerInterface An ISystemControllerInterface is the interface between a component and the System controller controlling the component. The interface allows for two-way communication between the component and the system controller by means of sending requests and getting responses. Classes deriving from the ISystemControllerInterface should provide the component side implementation of the communication with the system controller. This interface can be inherited and implemented by developers to connect to custom system controllers, or to directly control a component programmatically, without the need for connecting to a remote server. An ISystemControllerInterface can have a parent-child relationship with other interfaces, where the children are aware of which their parent interface is. This is useful for components that provides extra features for another component, but where the components are still to be considered as two separate entities with separate connections to the System controller. |
| struct | ISystemControllerInterface::Response A response to a request, consists of a status code and an (optional) parameters JSON object. |
| struct | ISystemControllerInterface::Callbacks A struct containing the callbacks that needs to be registered by the component using this interface. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <functional>
#include <json.hpp>
#include <string>
class ISystemControllerInterface {
public:
enum class StatusCode : uint32_t {
SUCCESS = 3001, // Accept / Success
TOO_MANY_REQUESTS = 3101, // Too many requests, try again later
UUID_ALREADY_REGISTERED = 3201, // UUID is already registered
FORMAT_ERROR = 3202, // Message formatting error
ALREADY_CONFIGURED = 3203, // The requested thing to configure is already configured
OUT_OF_RESOURCES = 3204, // Out of resources (CPU/GPU close to max utilization, all available slots used, etc.)
NOT_FOUND = 3205, // The requested thing was not found
INTERNAL_ERROR = 3206, // Internal error when trying to serve the request
CONNECTION_FAILED = 3207, // Connection failure
TIMEOUT_EXCEEDED = 3208, // Timeout exceeded
KEY_MISMATCH = 3209, // Key mismatch (might be a timeout, 3007 in the future)
UNKNOWN_REQUEST = 3210, // The name of the request was not known
MALFORMED_REQUEST = 3211, // The request is not correctly formatted
ALREADY_IN_USE = 3212, // The requested resource is already in use
// None, yet
};
struct Response {
StatusCode mCode;
nlohmann::json mParameters; // Can be empty
};
struct Callbacks {
std::function<Response(const std::string&, const nlohmann::json&)>
mRequestCallback; // Callback called when then controller has sent a request
std::function<void(uint32_t, const std::string&, const std::error_code&)>
mConnectionClosedCallback; // Callback called when the connection to the controller is closed
};
virtual ~ISystemControllerInterface() = default;
virtual Response sendRequest(const std::string& request, const nlohmann::json& parameters) = 0;
virtual bool registerRequestCallback(const Callbacks& callbacks) = 0;
virtual bool connect() = 0;
virtual bool disconnect() = 0;
virtual bool isConnected() const = 0;
virtual std::string getUUID() const = 0;
virtual bool hasParent() const = 0;
virtual std::shared_ptr<ISystemControllerInterface> getParentInterface() const = 0;
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.11 - include/MediaReceiver.h
include/MediaReceiver.h
Classes
| Name | |
|---|---|
| class | MediaReceiver A MediaReceiver contains the logic for receiving, decoding and aligning incoming media sources from the Ingests. The aligned data is then delivered to the Rendering Engine which is also responsible for setting up the MediaReceiver. The MediaReceiver has a builtin multi view generator, which can create output streams containing composited subsets of the incoming video sources. This class is controlled using an ISystemControllerInterface provided when starting it. |
| struct | MediaReceiver::NewStreamParameters A struct containing information on the format of an incoming stream. |
| struct | MediaReceiver::Settings Settings for a MediaReceiver. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <memory>
#include <utility>
#include <cuda.h>
#include "AlignedFrame.h"
#include "ISystemControllerInterface.h"
class MediaReceiver {
public:
struct NewStreamParameters {
uint32_t mVideoHeight = 0; // Height of the video in pixels. 0 if the stream does not contain any video
uint32_t mVideoWidth = 0; // Width of the video in pixels. 0 if the stream does not contain any video
uint32_t mFrameRateN = 0; // Frame rate numerator
uint32_t mFrameRateD = 1; // Frame rate denominator
uint32_t mAudioSampleRate = 0; // Sample rate of the audio in Hz. 0 if the stream does not contain any audio
};
struct Settings {
AlignedFrame::PixelFormat mDecodedFormat = AlignedFrame::PixelFormat::kRgba64Le;
std::function<std::function<void(const AlignedFramePtr&)>(uint32_t inputSlot,
const std::string& streamID,
const NewStreamParameters& newStreamParameters)>
mNewConnectionCallback;
std::function<void(uint32_t inputSlot)> mClosedConnectionCallback;
bool mUseMultiViewer = false;
bool mDeliverOld = false;
CUstream mAlignedFrameFreeStream = nullptr;
};
enum class TallyBorderColor : uint32_t { kNone, kRed, kGreen, kYellow };
MediaReceiver();
~MediaReceiver();
bool start(const std::shared_ptr<ISystemControllerInterface>& controllerInterface,
CUcontext cudaContext,
const Settings& settings);
void stop();
std::function<void(const AlignedFramePtr&)> getCustomMultiViewSourceInput(uint32_t inputSlot,
const std::string& name = "");
bool removeCustomMultiViewSourceInput(uint32_t inputSlot);
void setTallyBorder(uint32_t inputSlot, TallyBorderColor color);
void clearTallyBorder(uint32_t inputSlot);
void clearAllTallyBorders();
[[nodiscard]] MediaReceiver::TallyBorderColor getTallyBorder(uint32_t inputSlot) const;
MediaReceiver(MediaReceiver const&) = delete; // Copy construct
MediaReceiver(MediaReceiver&&) = delete; // Move construct
MediaReceiver& operator=(MediaReceiver const&) = delete; // Copy assign
MediaReceiver& operator=(MediaReceiver&&) = delete; // Move assign
static std::string getVersion();
static std::string getBuildInfo();
static std::string getLibraryVersions();
private:
class Impl;
std::unique_ptr<Impl> pImpl;
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.12 - include/MediaStreamer.h
include/MediaStreamer.h
Classes
| Name | |
|---|---|
| class | MediaStreamer MediaStreamer is a class that can take a single stream of uncompressed video and/or audio frames and encode and output it in some way to some interface. This interface can either be a stream to a network or writing down the data to a file on the hard drive. This class is configured from two interfaces. The input configuration (input video resolution, frame rate, pixel format, number of audio channels…) is made through this C++ API. The output stream is then started from the System Controller. Any of these configurations can be made first. The actual stream to output will start once the first call to. |
| struct | MediaStreamer::Configuration The input configuration of the frames that will be sent to this MediaStreamer. The output stream configuration is made from the System controller via the ISystemControllerInterface. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <memory>
#include <ISystemControllerInterface.h>
#include <cuda.h>
#include "AlignedFrame.h"
class MediaStreamer final {
public:
struct Configuration {
// Video
AlignedFrame::PixelFormat mIncomingPixelFormat = AlignedFrame::PixelFormat::kUnknown;
uint32_t mWidth = 0; // Width of the incoming video frames in pixels
uint32_t mHeight = 0; // Height of the incoming video frames in pixels
uint32_t mFrameRateN = 0; // Frame rate numerator of the incoming video frames
uint32_t mFrameRateD = 0; // Frame rate denominator of the incoming video frames
// Audio
uint32_t mAudioSampleRate = 0; // Audio sample rate of the incoming frames in Hz
uint32_t mNumAudioChannels = 0; // Number of audio channels in the incoming frames
};
MediaStreamer();
~MediaStreamer();
bool configure(const std::shared_ptr<ISystemControllerInterface>& controllerInterface, CUcontext cudaContext);
bool setInputFormatAndStart(const Configuration& configuration);
bool stopAndResetFormat();
[[nodiscard]] bool hasFormatAndIsRunning() const;
[[nodiscard]] bool hasOpenOutputStream() const;
bool outputData(const AlignedFramePtr& frame);
static std::string getVersion();
static std::string getBuildInfo();
private:
class Impl;
std::unique_ptr<Impl> pImpl;
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.13 - include/PipelineSystemControllerInterfaceFactory.h
include/PipelineSystemControllerInterfaceFactory.h
Classes
| Name | |
|---|---|
| class | PipelineSystemControllerInterfaceFactory |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <memory>
#include <string>
#include "SystemControllerConnection.h"
class PipelineSystemControllerInterfaceFactory final {
public:
PipelineSystemControllerInterfaceFactory(const std::string& systemControllerIP,
uint16_t systemControllerPort,
const std::string& systemControllerPostfix,
const std::string& psk,
const std::string& myIP,
bool useHTTPS,
bool allowInsecureHTTPS,
const std::string& customCaCertFile);
PipelineSystemControllerInterfaceFactory(PipelineSystemControllerInterfaceFactory const&) = delete;
PipelineSystemControllerInterfaceFactory(PipelineSystemControllerInterfaceFactory const&&) = delete;
PipelineSystemControllerInterfaceFactory& operator=(PipelineSystemControllerInterfaceFactory const&) = delete;
PipelineSystemControllerInterfaceFactory& operator=(PipelineSystemControllerInterfaceFactory const&&) = delete;
std::shared_ptr<SystemControllerConnection> getMediaReceiverInterface(const std::string& name);
// /// to generate the parent interface.
std::shared_ptr<SystemControllerConnection> createMediaStreamerInterface(const std::string& name);
std::shared_ptr<SystemControllerConnection> createControlReceiverInterface(const std::string& name);
private:
std::string mSystemControllerIP;
uint16_t mSystemControllerPort = 0;
std::string mSystemControllerPostfix;
std::string mPsk;
std::string mMyIP;
bool mUseHTTPS = true;
bool mAllowInsecureHTTPS = false;
std::string mCustomCaCertFile;
std::shared_ptr<SystemControllerConnection> mReceiverController;
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.14 - include/SystemControllerConnection.h
include/SystemControllerConnection.h
Classes
| Name | |
|---|---|
| class | SystemControllerConnection An implementation of the ISystemControllerInterface for a System controller residing in a remote server. The connection to the server uses a Websocket. |
| struct | SystemControllerConnection::Settings Settings for a SystemControllerConnection. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <chrono>
#include "ISystemControllerInterface.h"
#include "json.hpp"
class SystemControllerConnection final : public ISystemControllerInterface {
public:
enum class ComponentType : uint32_t {
kIngest,
kMediaReceiver,
kMediaStreamer,
kControlDataReceiver,
kControlDataSender,
};
struct Settings {
std::string mSystemControllerIP; // IP of the server
uint16_t mSystemControllerPort; // Port of the server
std::string mSystemControllerPostfix; // Postfix of the address that the backend uses if any
std::string mPSK; // The pre shared key used for authorization with the system controller server
std::string mUUID; // The UUID of the device using this library
ComponentType mType; // The component type of the component using this SystemControllerConnection
std::string mName; // The component name (optional)
std::string mMyIP; // The external IP of the system the component is running on. Will be sent to the system
// controller server in the announce message (optional)
std::chrono::milliseconds mConnectTimeout{
3000}; // Max time to wait on an announcement response from the server during connection
bool mEnableHTTPS; // Enable the communication between the system controller and a component encrypted
bool mInsecureHTTPS; // Disable the verification of the TLS certificate if requested.
std::string mCustomCaCertFile; // Custom CA certificate
};
SystemControllerConnection();
~SystemControllerConnection() override;
bool configure(const Settings& settings,
const std::shared_ptr<ISystemControllerInterface>& parentInterface = nullptr);
bool connect() override;
bool isConnected() const override;
std::string getUUID() const override;
Response sendRequest(const std::string& request, const nlohmann::json& parameters) override;
bool disconnect() override;
bool registerRequestCallback(const Callbacks& callbacks) override;
bool hasParent() const override;
std::shared_ptr<ISystemControllerInterface> getParentInterface() const override;
SystemControllerConnection(SystemControllerConnection const&) = delete; // Copy construct
SystemControllerConnection(SystemControllerConnection&&) = delete; // Move construct
SystemControllerConnection& operator=(SystemControllerConnection const&) = delete; // Copy assign
SystemControllerConnection& operator=(SystemControllerConnection&&) = delete; // Move assign
private:
class Impl;
std::unique_ptr<Impl> pImpl;
};
Updated on 2023-10-03 at 14:32:11 +0200
3.2.15 - include/TimeCommon.h
include/TimeCommon.h
Namespaces
| Name |
|---|
| TimeCommon |
Classes
| Name | |
|---|---|
| struct | TimeCommon::TAIStatus |
| struct | TimeCommon::TimeStructure |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <chrono>
#include <cstdint>
#include <fstream>
#include <sstream>
#include "expected.hpp"
namespace TimeCommon {
enum class StratumLevel {
UnknownStratum,
stratum0,
stratum1,
stratum2,
stratum3,
stratum4,
};
struct TAIStatus {
StratumLevel mStratum = StratumLevel::UnknownStratum;
bool mHasLock = false;
double mTimeDiffS = 0.0; // Time diff vs NTP in seconds, +/- value means slow/faster than NTP time
};
// Little endian
// Minimum size packet is 64 - bytes
struct TimeStructure {
uint64_t t1 = 0; // 8-bytes / Total 8-bytes == Client time T1
uint64_t t2 = 0; // 8-bytes / Total 16-bytes == Server
uint64_t t3 = 0; // 8-bytes / Total 24-bytes
uint64_t t4 = 0; // 8-bytes / Total 32-bytes
uint64_t token = 0; // 8-bytes / Total 40-bytes == t1 ^ key
uint64_t dummy1 = 0; // 8-bytes / Total 48-bytes == for future use
uint64_t dummy2 = 0; // 8-bytes / Total 56-bytes == for future use
uint64_t dummy3 = 0; // 8-bytes / Total 64-bytes == for future use
};
uint64_t getMonotonicClockMicro();
tl::expected<TimeCommon::TAIStatus, std::string> getStatus();
int64_t getTAIMicro();
std::string taiMicroToString(int64_t taiTimestamp);
} // namespace TimeCommon
Updated on 2023-10-03 at 14:32:11 +0200
3.2.16 - include/UUIDUtils.h
include/UUIDUtils.h
Namespaces
| Name |
|---|
| UUIDUtils A namespace for UUID utility functions. |
Source code
// Copyright (c) 2022, Edgeware AB. All rights reserved.
#pragma once
#include <string>
namespace UUIDUtils {
std::string generateRandomUUID();
bool isValidUUIDString(const std::string& uuid);
} // namespace UUIDUtils
Updated on 2023-10-03 at 14:32:11 +0200
3.3 - Namespaces
Namespaces
- namespace AclLog
A namespace for logging utilities. - namespace ControlDataCommon
- namespace IngestUtils
- namespace TimeCommon
- namespace UUIDUtils
A namespace for UUID utility functions. - namespace spdlog
Updated on 2023-10-03 at 14:32:11 +0200
3.3.1 - AclLog
AclLog
A namespace for logging utilities.
Classes
| Name | |
|---|---|
| class | AclLog::CommandLogFormatter This class is used to format log entries for Rendering Engine commands. |
| class | AclLog::ThreadNameFormatterFlag |
| class | AclLog::FileLocationFormatterFlag A custom flag formatter which logs the source file location between a par of “[]”, in case the location is provided with the log call. |
Types
| Name | |
|---|---|
| enum class | Level { kTrace, kDebug, kInfo, kWarning, kError, kCritical, kOff} Log levels. |
Functions
| Name | |
|---|---|
| void | init(const std::string & name) Initialize logging. |
| void | initCommandLog(const std::string & name) Init the Rendering Engine command log. |
| void | setLevel(Level level) Set global logging level. |
| void | logCommand(const std::string & command) Log a command to the command log. |
| AclLog::Level | getLogLevel() Internal helper function for getting the setting for the log level. |
| size_t | getMaxFileSize() Internal helper function for getting the setting for the maximum size for a log file. |
| size_t | getMaxLogRotations() Internal helper function for getting the setting for the maximum number of rotated log files. |
| std::filesystem::path | getLogFileFullPath(const std::string & name) Internal helper function for constructing the full path name for the log file. |
| std::string | getThreadName() |
Types Documentation
enum Level
| Enumerator | Value | Description |
|---|---|---|
| kTrace | ||
| kDebug | ||
| kInfo | ||
| kWarning | ||
| kError | ||
| kCritical | ||
| kOff |
Log levels.
Functions Documentation
function init
void init(
const std::string & name
)
Initialize logging.
Parameters:
- name The name of the component (used for log prefix and filename)
By default two sinks are created. The first sink writes messages to the console. The second sink attempts to create a log file in the path set by the environment variable ACL_LOG_PATH (’/tmp’ if unset). The name of the log file is ’name-
function initCommandLog
void initCommandLog(
const std::string & name
)
Init the Rendering Engine command log.
Parameters:
- name The name of the Rendering Engine (used for filename)
function setLevel
void setLevel(
Level level
)
Set global logging level.
Parameters:
- level Logging level to set
function logCommand
void logCommand(
const std::string & command
)
Log a command to the command log.
Parameters:
- command The command to log
function getLogLevel
AclLog::Level getLogLevel()
Internal helper function for getting the setting for the log level.
Return: The wanted log level fetched from an environment variable if set, or else a default value
function getMaxFileSize
size_t getMaxFileSize()
Internal helper function for getting the setting for the maximum size for a log file.
Return: The wanted maximum size of the log file fetched from an environment variable if set, or else a default value
function getMaxLogRotations
size_t getMaxLogRotations()
Internal helper function for getting the setting for the maximum number of rotated log files.
Return: The wanted number of log files to rotate fetched from an environment variable if set, or else a default value
function getLogFileFullPath
std::filesystem::path getLogFileFullPath(
const std::string & name
)
Internal helper function for constructing the full path name for the log file.
Parameters:
- name The name of the component
Return: The full path to the log file
function getThreadName
inline std::string getThreadName()
Updated on 2023-10-03 at 14:32:11 +0200
3.3.2 - ControlDataCommon
ControlDataCommon
Classes
| Name | |
|---|---|
| struct | ControlDataCommon::ConnectionStatus Connection status struct containing information about a connection event. |
| struct | ControlDataCommon::Response A response from a ControlDataReceiver to a request. The UUID tells which receiver the response is sent from. |
| struct | ControlDataCommon::StatusMessage A status message from a ControlDataReceiver. The UUID tells which receiver the message is sent from. |
Types
| Name | |
|---|---|
| enum class | ConnectionType { CONNECTED, DISCONNECTED} The connection types. |
Types Documentation
enum ConnectionType
| Enumerator | Value | Description |
|---|---|---|
| CONNECTED | ||
| DISCONNECTED |
The connection types.
Updated on 2023-10-03 at 14:32:11 +0200
3.3.3 - IngestUtils
IngestUtils
Functions
| Name | |
|---|---|
| bool | isRunningWithRootPrivileges() |
Functions Documentation
function isRunningWithRootPrivileges
bool isRunningWithRootPrivileges()
Return: true if this application is executing with root privileges, false otherwise
Updated on 2023-10-03 at 14:32:11 +0200
3.3.4 - spdlog
spdlog
Updated on 2023-10-03 at 14:32:11 +0200
3.3.5 - TimeCommon
TimeCommon
Classes
| Name | |
|---|---|
| struct | TimeCommon::TAIStatus |
| struct | TimeCommon::TimeStructure |
Types
| Name | |
|---|---|
| enum class | StratumLevel { UnknownStratum, stratum0, stratum1, stratum2, stratum3, stratum4} |
Functions
| Name | |
|---|---|
| uint64_t | getMonotonicClockMicro() Get current time since epoch. |
| tl::expected< TimeCommon::TAIStatus, std::string > | getStatus() Get TAI status. |
| int64_t | getTAIMicro() Get current TAI time. |
| std::string | taiMicroToString(int64_t taiTimestamp) Converts the input TAI timestamp to a human readable string. Timestamp is converted to local time including leap seconds. |
Types Documentation
enum StratumLevel
| Enumerator | Value | Description |
|---|---|---|
| UnknownStratum | ||
| stratum0 | ||
| stratum1 | ||
| stratum2 | ||
| stratum3 | ||
| stratum4 |
Functions Documentation
function getMonotonicClockMicro
uint64_t getMonotonicClockMicro()
Get current time since epoch.
Return: Return current time since epoch in microseconds
function getStatus
tl::expected< TimeCommon::TAIStatus, std::string > getStatus()
Get TAI status.
Return: Expected with the TAI status if successful or an error string in case something went wrong
function getTAIMicro
int64_t getTAIMicro()
Get current TAI time.
Return: Return current TAI time in microseconds
function taiMicroToString
std::string taiMicroToString(
int64_t taiTimestamp
)
Converts the input TAI timestamp to a human readable string. Timestamp is converted to local time including leap seconds.
Parameters:
- taiTimestamp A TAI timestamp with microseconds resolution
Return: Return a human readable timestamp
Updated on 2023-10-03 at 14:32:11 +0200
3.3.6 - UUIDUtils
UUIDUtils
A namespace for UUID utility functions.
Functions
| Name | |
|---|---|
| std::string | generateRandomUUID() Generates a completely randomized UUID string. |
| bool | isValidUUIDString(const std::string & uuid) Checks if a string is a valid UUID string. |
Functions Documentation
function generateRandomUUID
std::string generateRandomUUID()
Generates a completely randomized UUID string.
Return: A random generated UUID string
function isValidUUIDString
bool isValidUUIDString(
const std::string & uuid
)
Checks if a string is a valid UUID string.
Parameters:
- uuid The string to check
Return: True if uuid is a valid UUID string, otherwise false
Updated on 2023-10-03 at 14:32:11 +0200
4 - System controller config
This page describes the configuration settings possible to set via the acl_sc_settings.json file.
| Expanded Config name | Config name | Description | Default value |
|---|---|---|---|
| psk | psk | The Pre-shared key used to authorize components to connect to the System Controller. Must be 32 characters long | "" |
| security.salt | salt | Salt string for the generation of tokens and encryption keys | “Some random string” |
| security.n | n | Parameter for token and encryption generation. N is CPU/memory cost parameter, must be a power of 2, greater than 1. 1 | 65536 |
| security.r | r | Parameter for token and encryption generation. R is block size factor. R constrain must satisfy R*P < 2^30. 1 | 8 |
| security.p | p | Parameter for token and encryption generation. P is the parallelization parameter. P constrain must satisfy R*P < 2^30, if this is exceeded, an error will be returned 1 | 1 |
| security.keylen | keylen | The length of the generated tokens | 32 |
| client_auth.enabled | enabled | Switch to enable basic authentication for clients in the REST API | true |
| client_auth.username | username | The username that will grant access to the REST API | “admin” |
| client_auth.password | password | Password that will grant access to the REST API | “changeme” |
| https.enabled | enabled | Switch to enable encryption of the REST API as well as the connections between the System Controller and the connected components | true |
| https.certificate_file | certificate_file | Path to the certificate file. In pem format | "" |
| https.private_key_file | private_key_file | Path to the private key file. In pem format | "" |
| logger.level | level | The level that the logging will produce output, available in ascending order: debug, info, warn, error | info |
| logger.file_name_prefix | file_name_prefix | The prefix of the log filename. A unique timecode and “.log” will automatically be appended to this prefix. The prefix can contain both the path and the prefix of the log file. | "" |
| site.port | port | Port on which the service is accessible | 8080 |
| site.host | host | Hostname on which the service is accessible | localhost |
| response_timeout | response_timeout | The maximum time of a request between the System Controller and a component before the request is timed out | 5000ms |
| cors.allowed_origins | allowed_origins | Comma-separated list of origin addresses that are allowed | ["*"] |
| cors.allowed_methods | allowed_methods | Comma-separated list of HTTP methods that the service accepts | [“GET”, “POST”, “PUT”, “PATCH”, “DELETE”] |
| cors.allowed_headers | allowed_headers | Comma-separated list of headers that are allowed | ["*"] |
| cors.exposed_headers | exposed_headers | Comma-separated list of headers that are allowed for exposure | [""] |
| cors.allow_credentials | allow_credentials | Allow the xKHR to set credentials cookies | false |
| cors.max_age | max_age | How long the preflight cache is stored before a new must be made | 300 |
| custom_headers.[N].key | key | Custom headers, the key of the header, e.g.: Cache-Control | None |
| custom_headers.[N].value | value | Custom headers, the value to the key of the header, e.g.: no-cache | None |